NPU Accelerated Face Detection Instructions
English | Chinese
Instructions
This example shows how to accelerate the operation of the YOLO-Fastest face detection model on the Titan Board using the Arm® Ethos™ -u55 NPU, And combine the CEU (Camera Engine Unit) camera interface and the RGB LCD display screen to achieve real-time face detection and display.
The main functions include:
Collect real-time video streams via CEU (OV5640 camera)
Perform YOLO-Fastest model inference on video frames using NPU Display the detection results (with face box) on the LCD screen
Supports hardware-accelerated YUV to RGB conversion and graphic rendering
Overall system architecture
The system data flow of this example is shown in the following figure:
[OV5640 Camera]
│
▼
[CEU camera acquisition module]
│ (YUV422)
▼
[DMA transfer to Frame Buffer (HyperRAM)]
│
├──► [NPU (eethos -U55) runs YOLO-Fastest inference]
│ │
│ ▼
│ [Test result: Coordinates + confidence level]
│
└──► [GLCDC Display controller]
│
▼
[RGB LCD real-time display]
Arm® Ethos™-U55 NPU Features
The RA8P1 MCU used by the Titan Board integrates the **Arm® Ethos™-U55 neural processing unit (NPU) **, which can work in coordination with the Cortex-M85 CPU to significantly enhance the inference performance of neural networks.
1. Hardware Features
Computing Power and Acceleration
Supports INT8 quantized models
Delivers performance up to several hundred GOPS (depending on configuration)
Supports common operators such as convolution, pooling, ReLU, and Softmax
Collaboration with CPU
Works with the Cortex-M85 through the CMSIS-NN and Ethos-U drivers
Supports asynchronous execution between NPU and CPU
Model pre-processing and post-processing are handled by the CPU
Memory and Bandwidth
Supports direct feature map access from on-chip SRAM or external HyperRAM
DMA accelerates model input/output data transfer
Multi-level caching mechanisms reduce latency
Compatibility
Fully compatible with TensorFlow Lite for Microcontrollers (TFLM)
Supports model formats converted by the Arm NN SDK (.tflite)
YOLO-Fastest Model Introduction
YOLO-Fastest is a lightweight object detection network designed for real-time operation on embedded devices.
Item |
Specification |
|---|---|
Model Type |
YOLO-Fastest (Face Detection) |
Model Framework |
TensorFlow Lite (INT8) |
Input Size |
192 x 192 |
Output |
Face bounding box coordinates + confidence |
Inference Time (Ethos-U55) |
Approx. 25 ms/frame |
Application Scenarios |
Face detection / Real-time visual recognition |
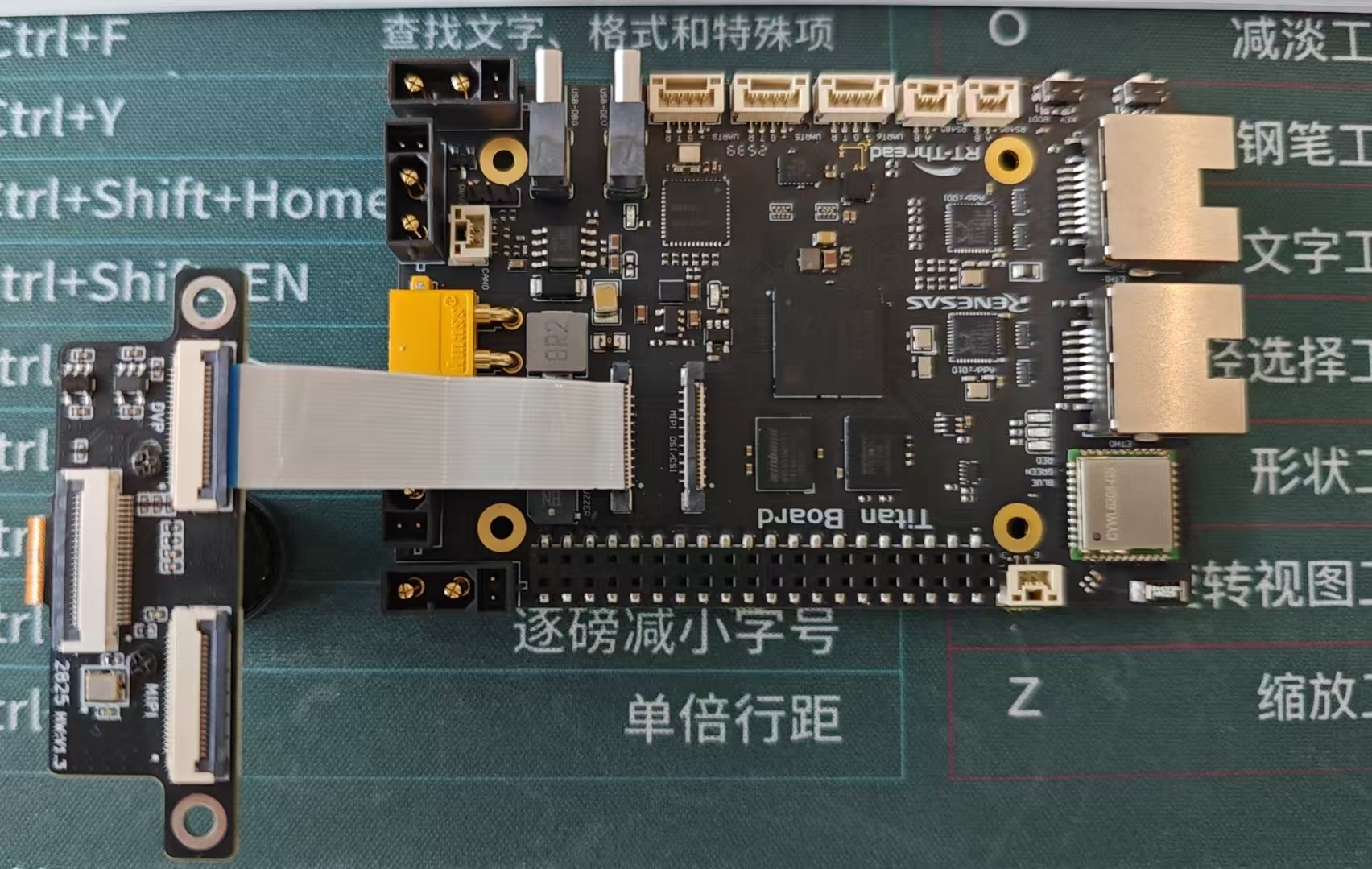
Hardware Description
The connection method of the CEU camera is as follows:
Use a 22-pin reverse FFC cable to connect the development board’s CEU_CAM connector to the camera adapter board’s DVP connector.
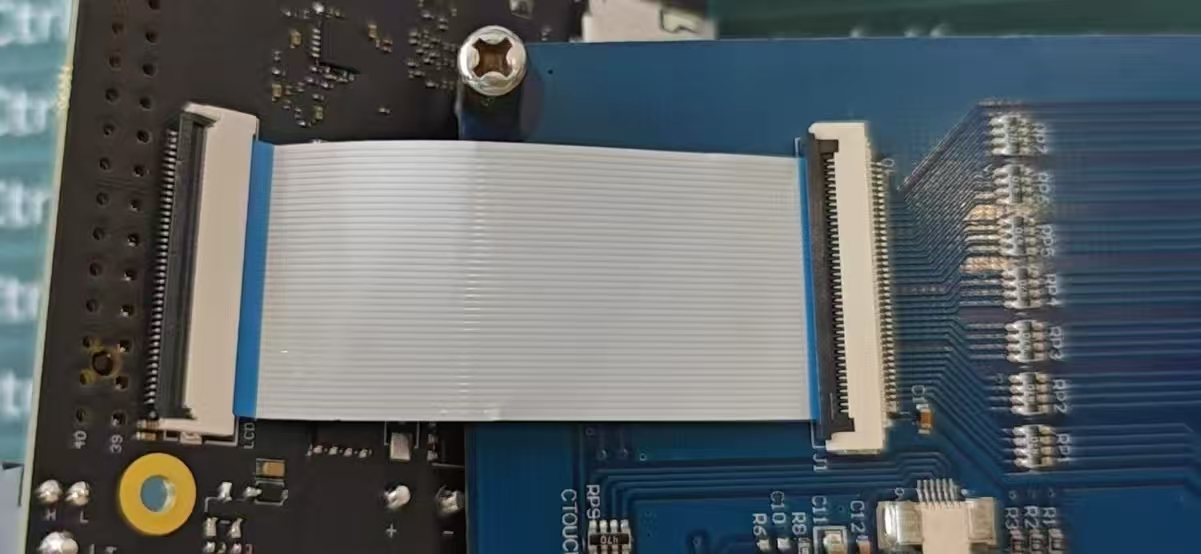
The connection method of RGB LCD is as follows:
Display model: ALIENTEK 4.3” RGB LCD 800×480
Use a 40-pin same-direction FFC cable to connect the development board’s LCD_RGB connector to the display.
FSP Configuration
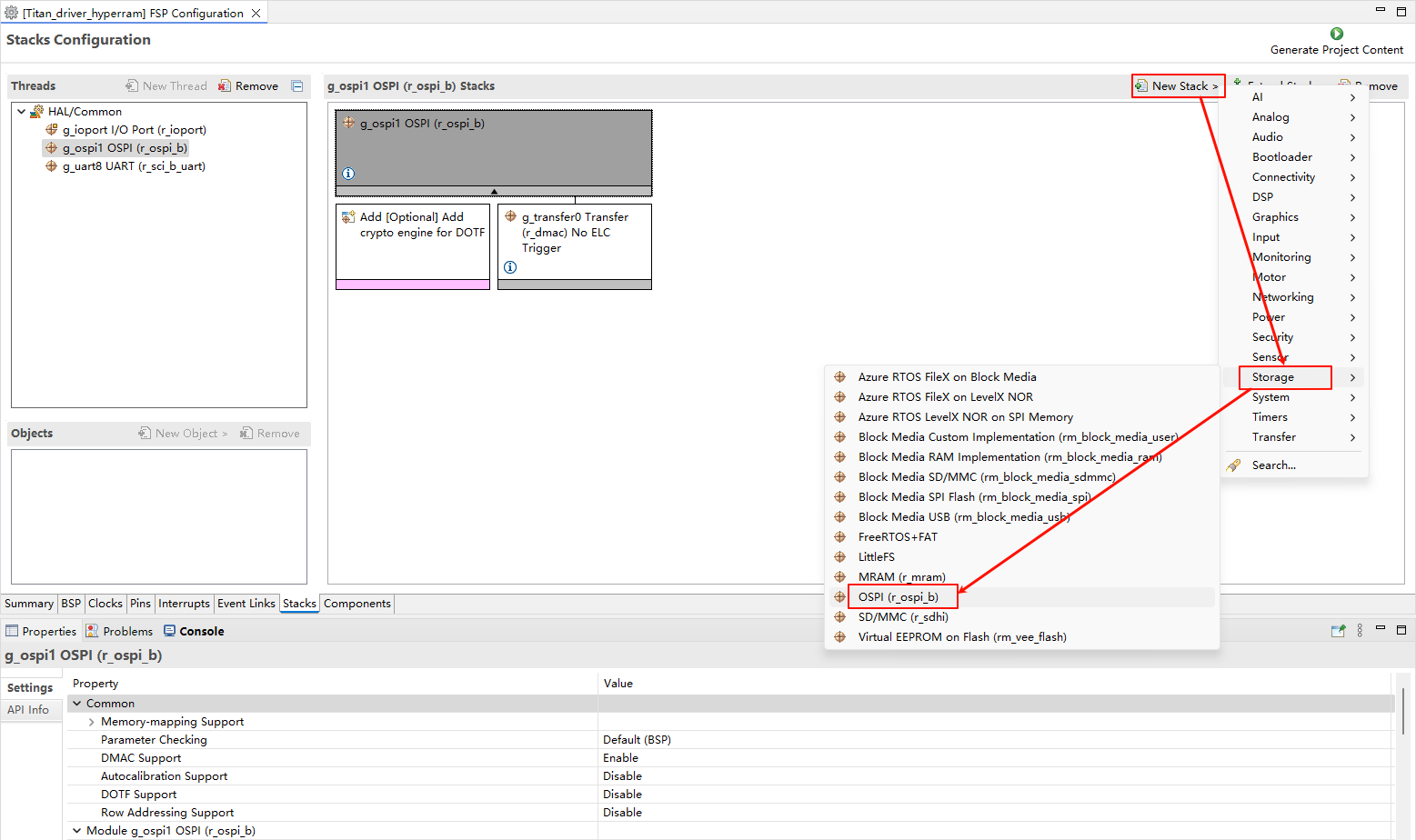
HyperRAM Configure
Create a
r_ospi_bstack:
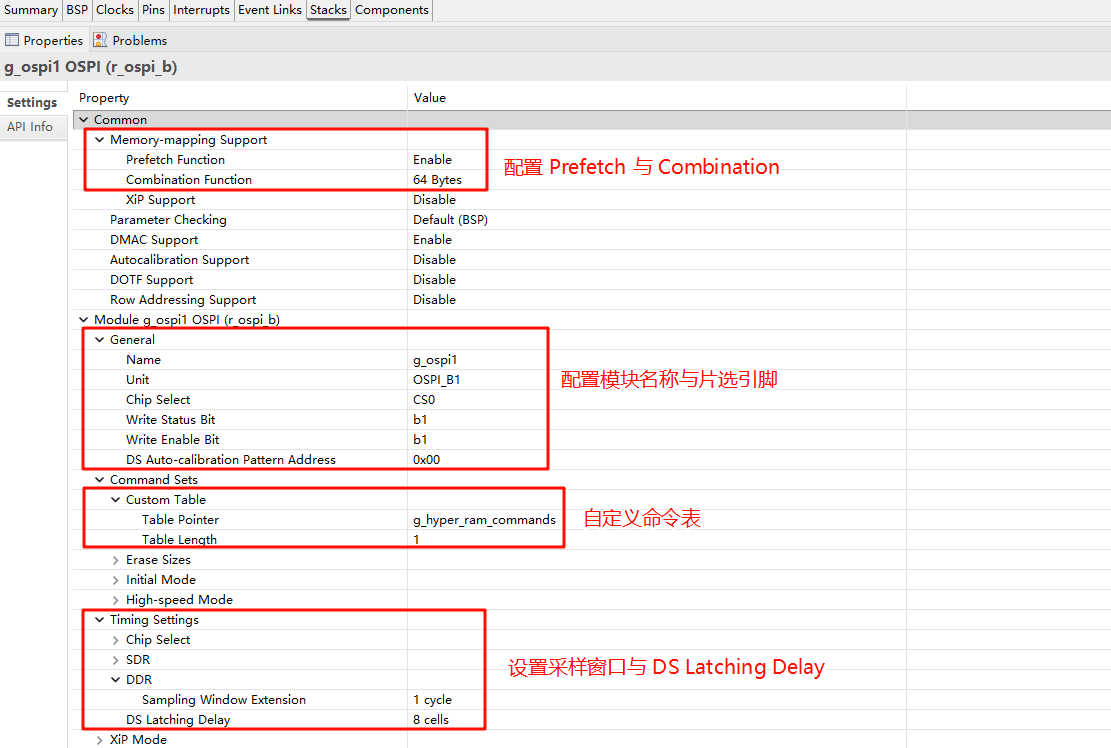
Configure
r_ospi_bstack:
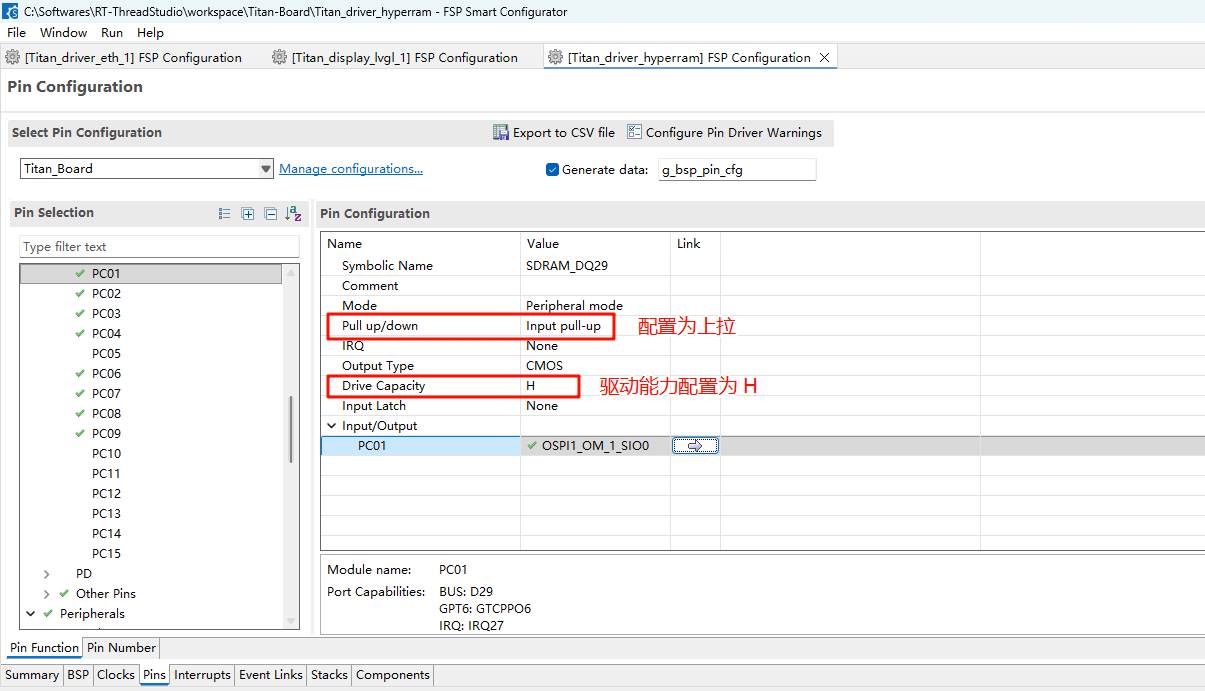
HyperRAM pins configure:
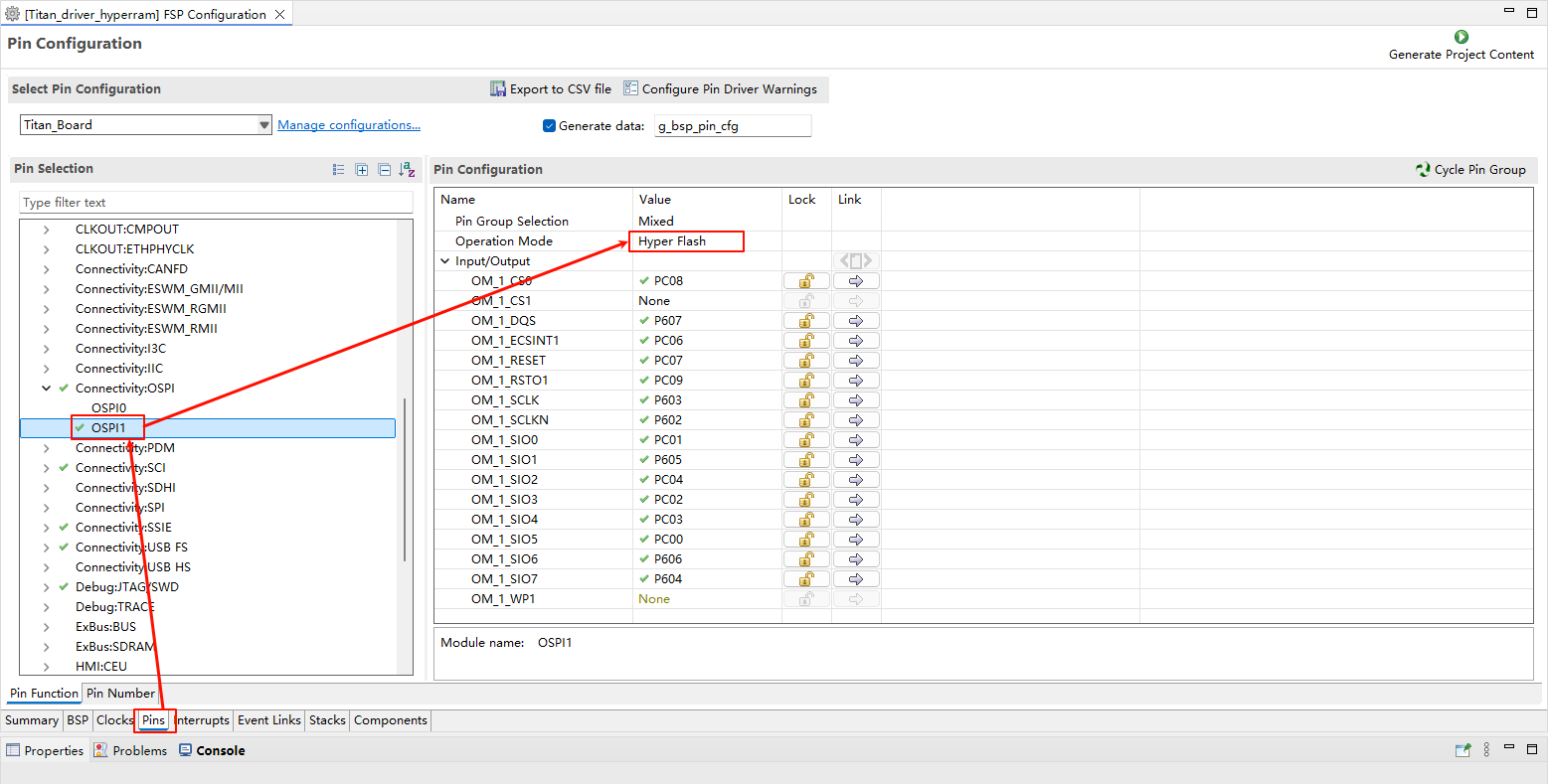
Set the drive strength of all HyperRAM-related pins to High (H), and configure OM_1_SIO0~OM_1_SIO7 as input with pull-up.
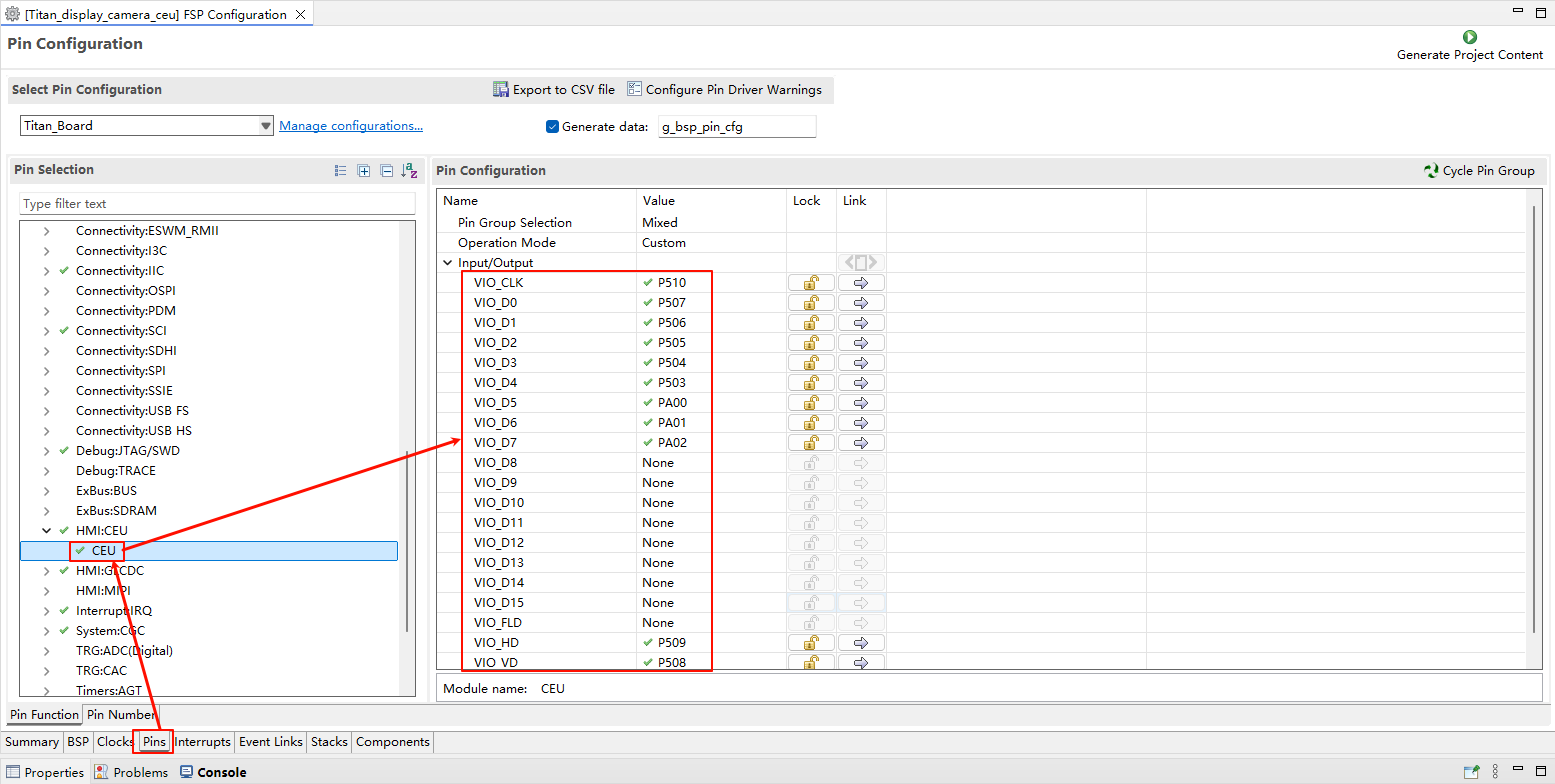
CEU Configuration
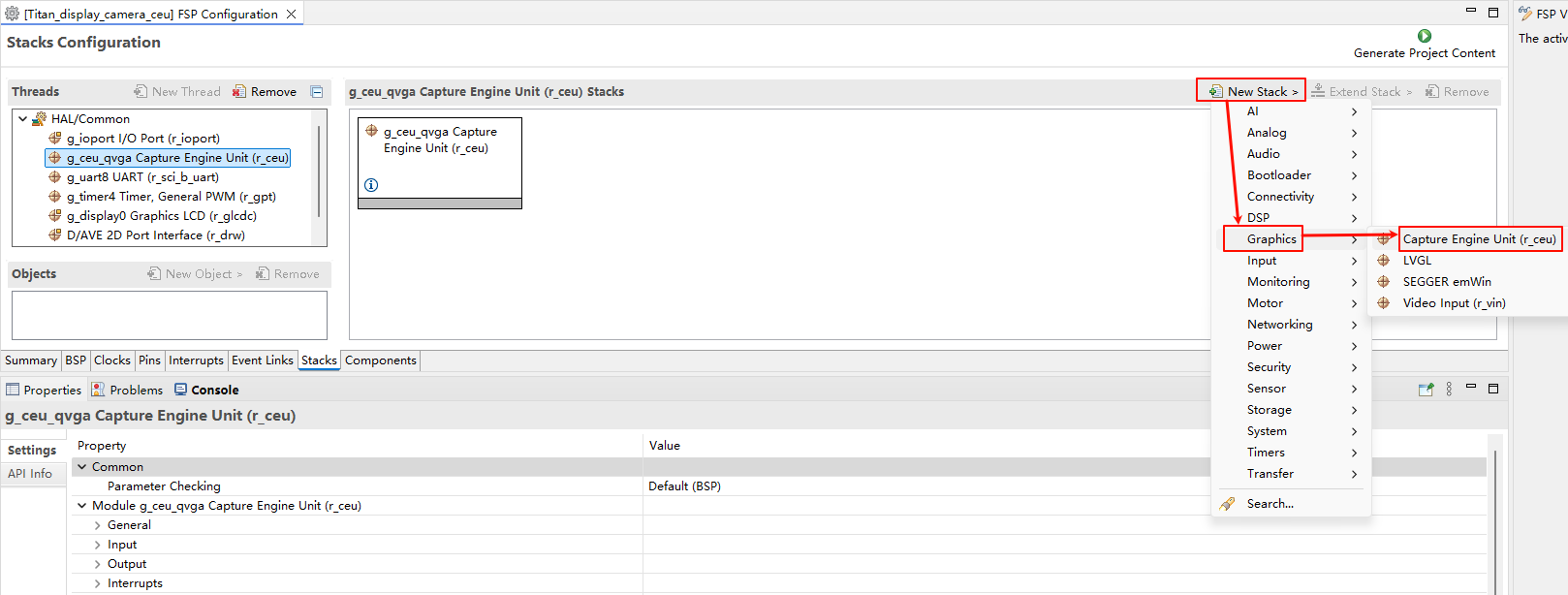
Create a
r_ceustack:
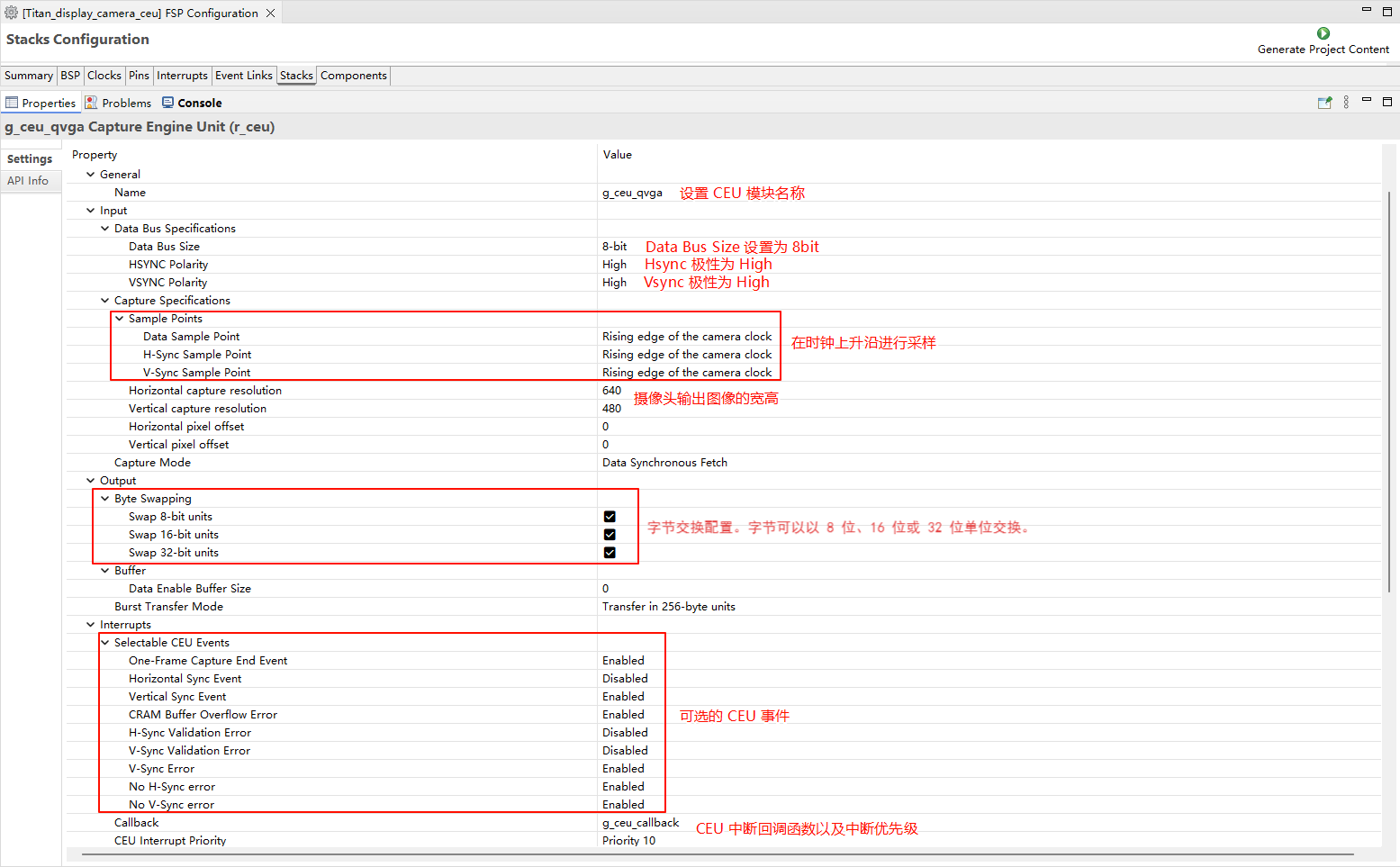
Configure CEU:
Configure CEU pins:
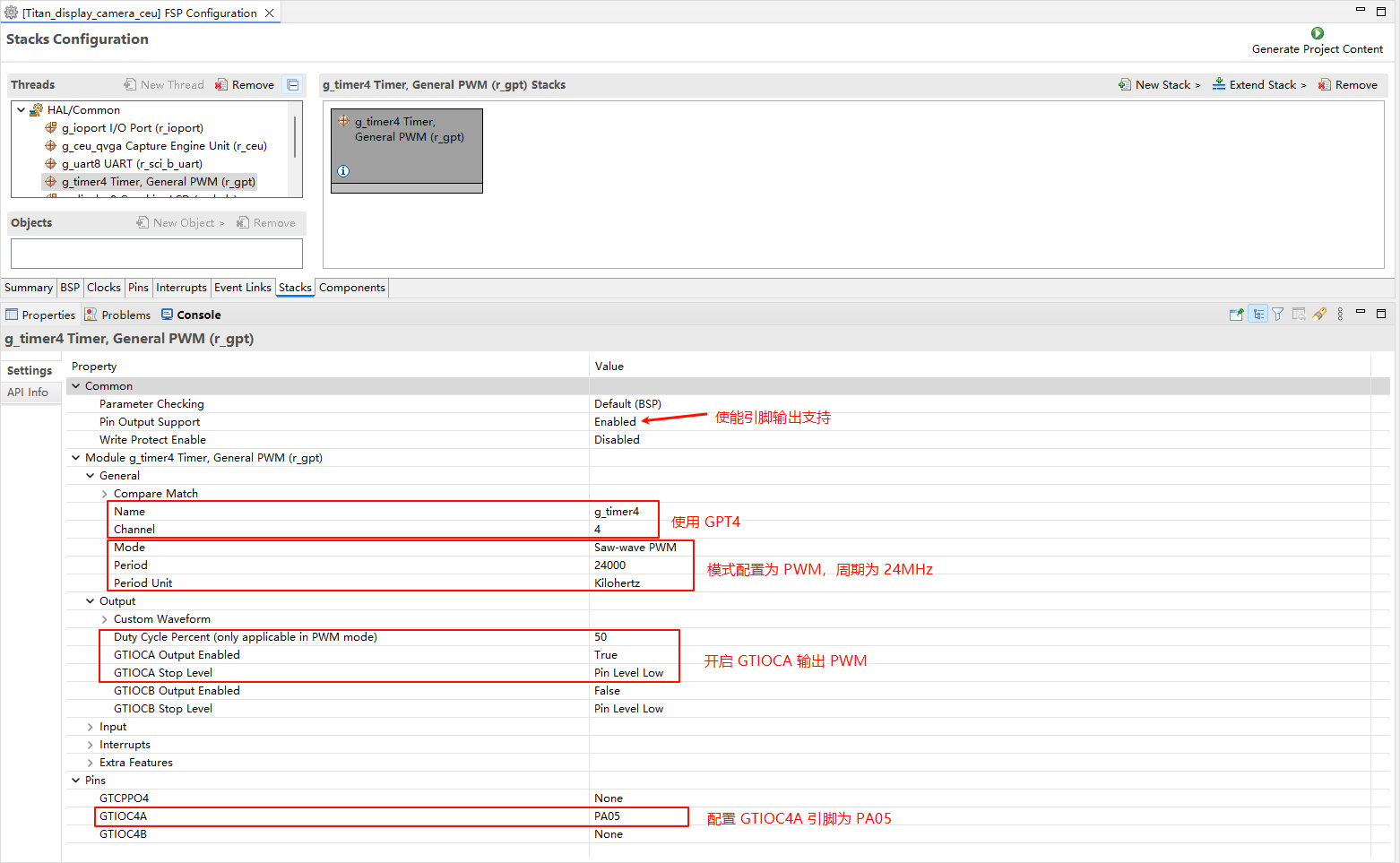
CEU Clock Configuration
Create a
r_gptstack:
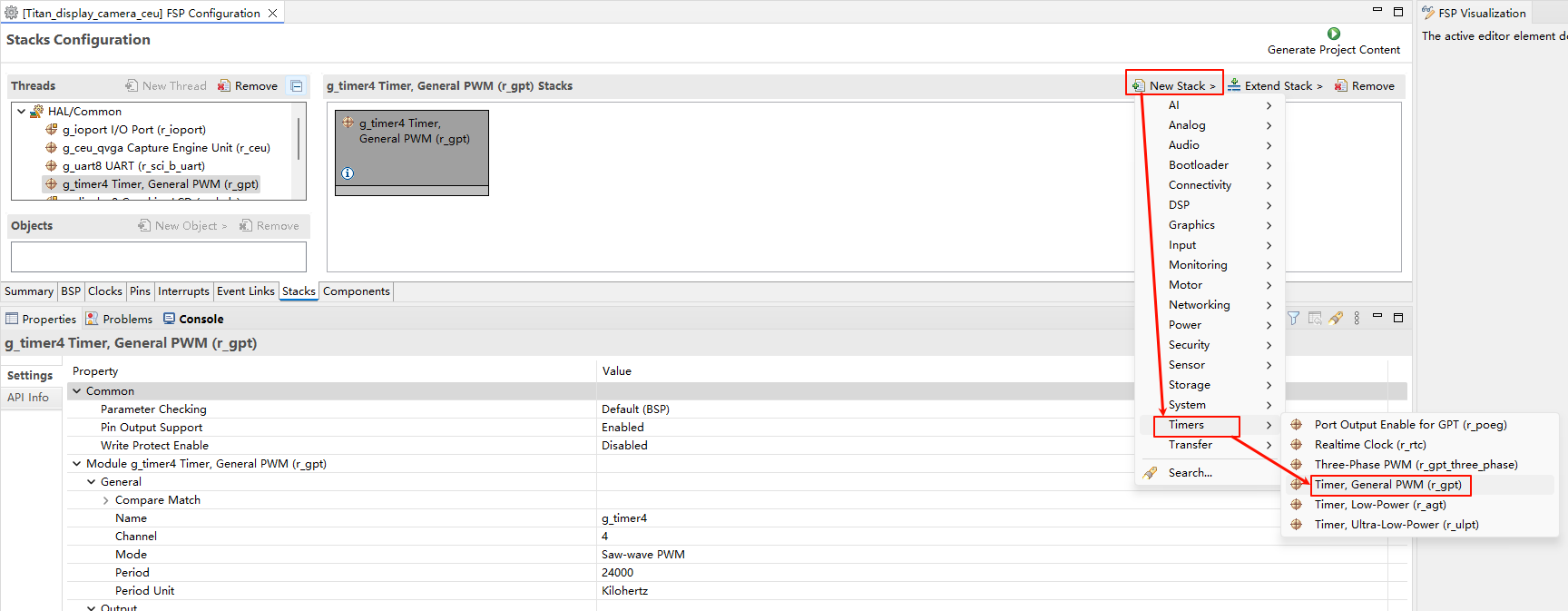
Configure the PWM output of the camera clock
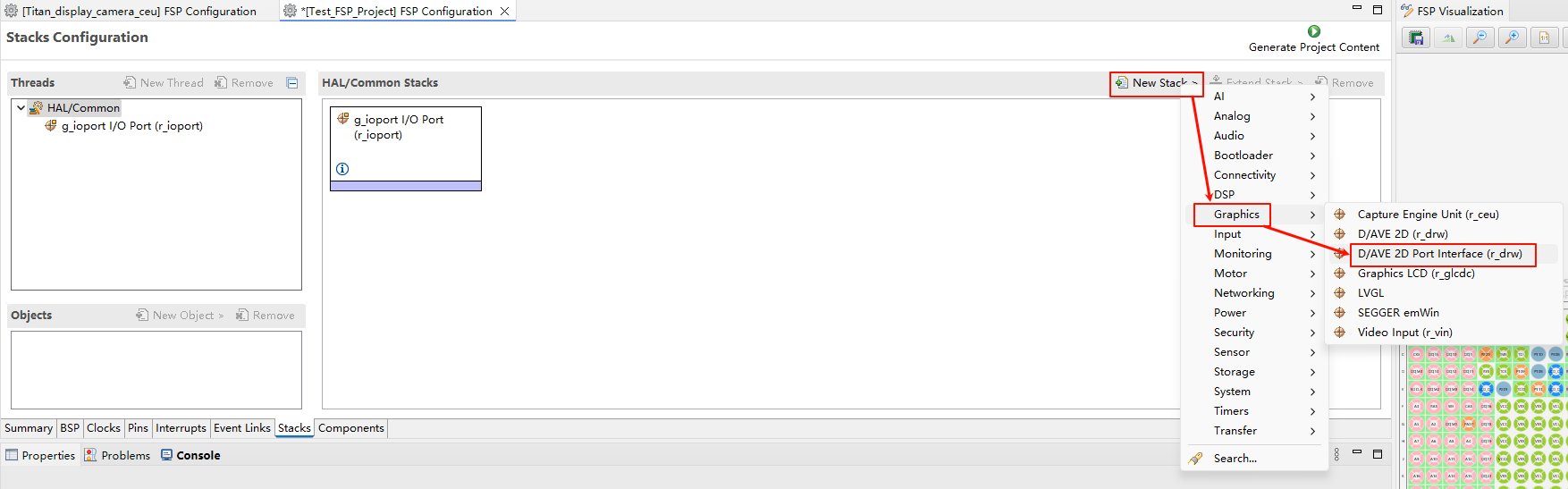
D/AVE 2D Configuration
Create a
r_drwstack:
RGB LCD Configuration
Create a
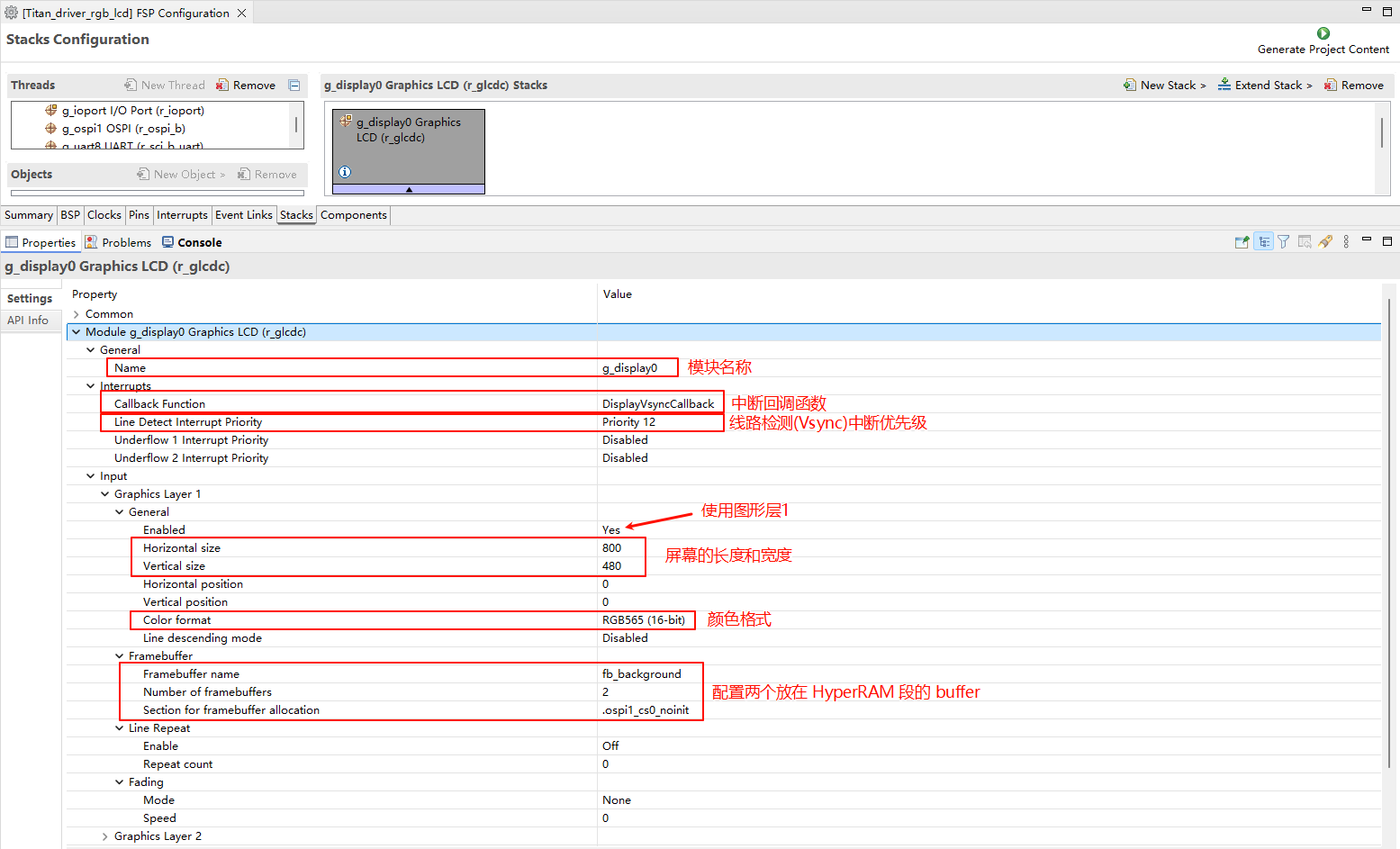
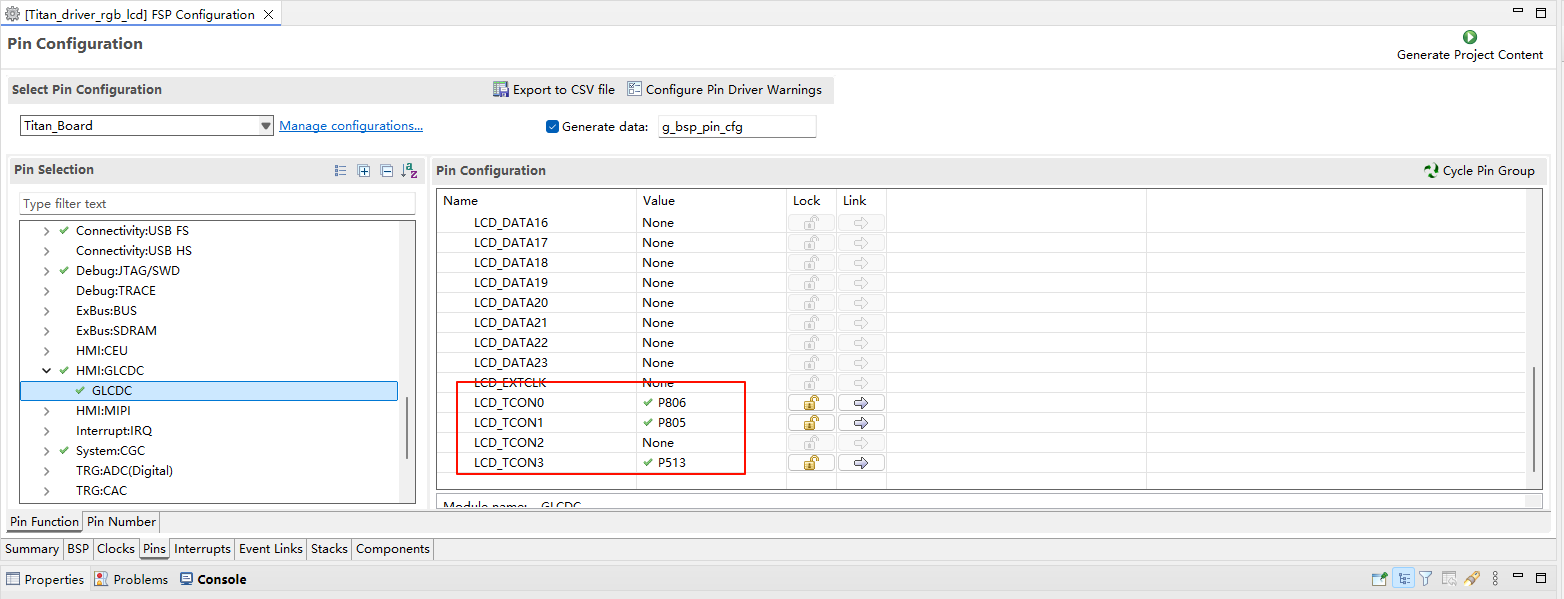
r_glcdcstack:
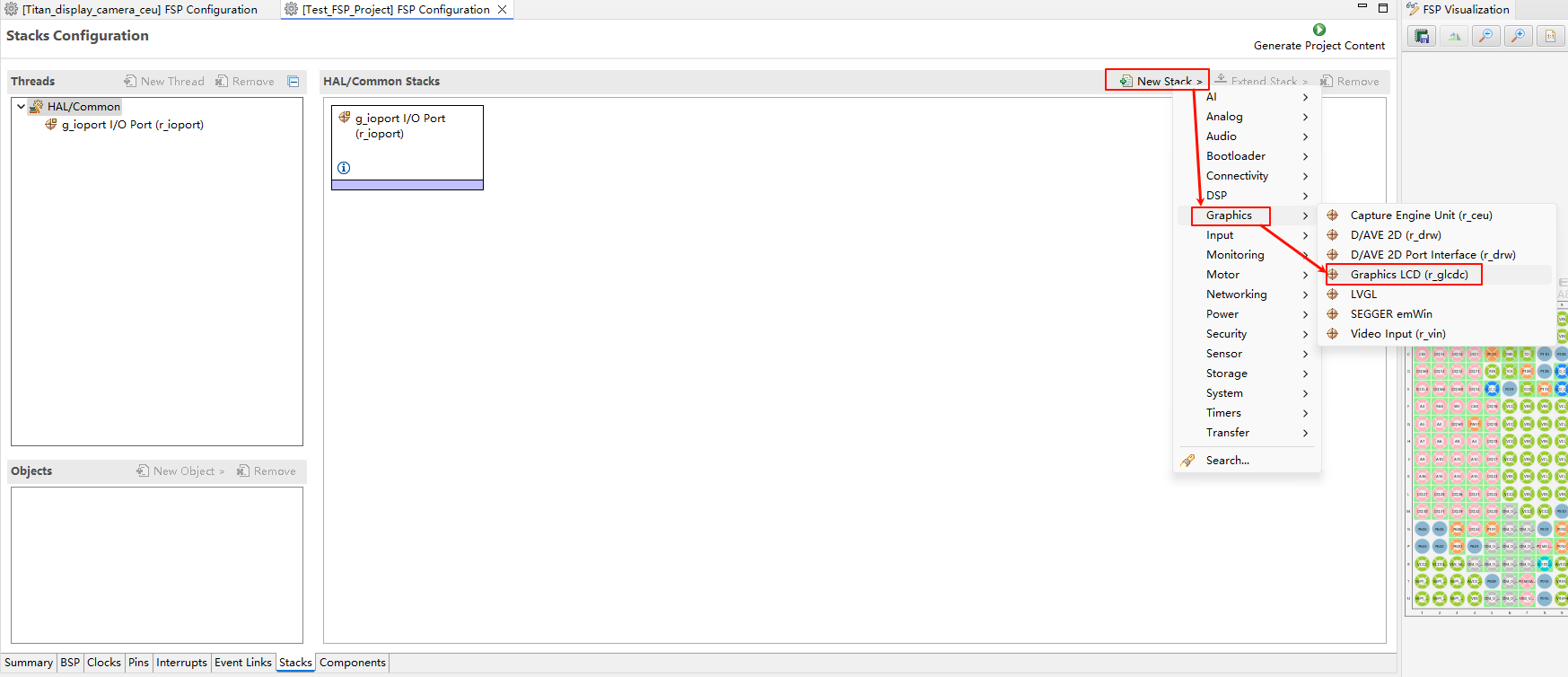
Configure interrupt callback and graphics Layer 1:
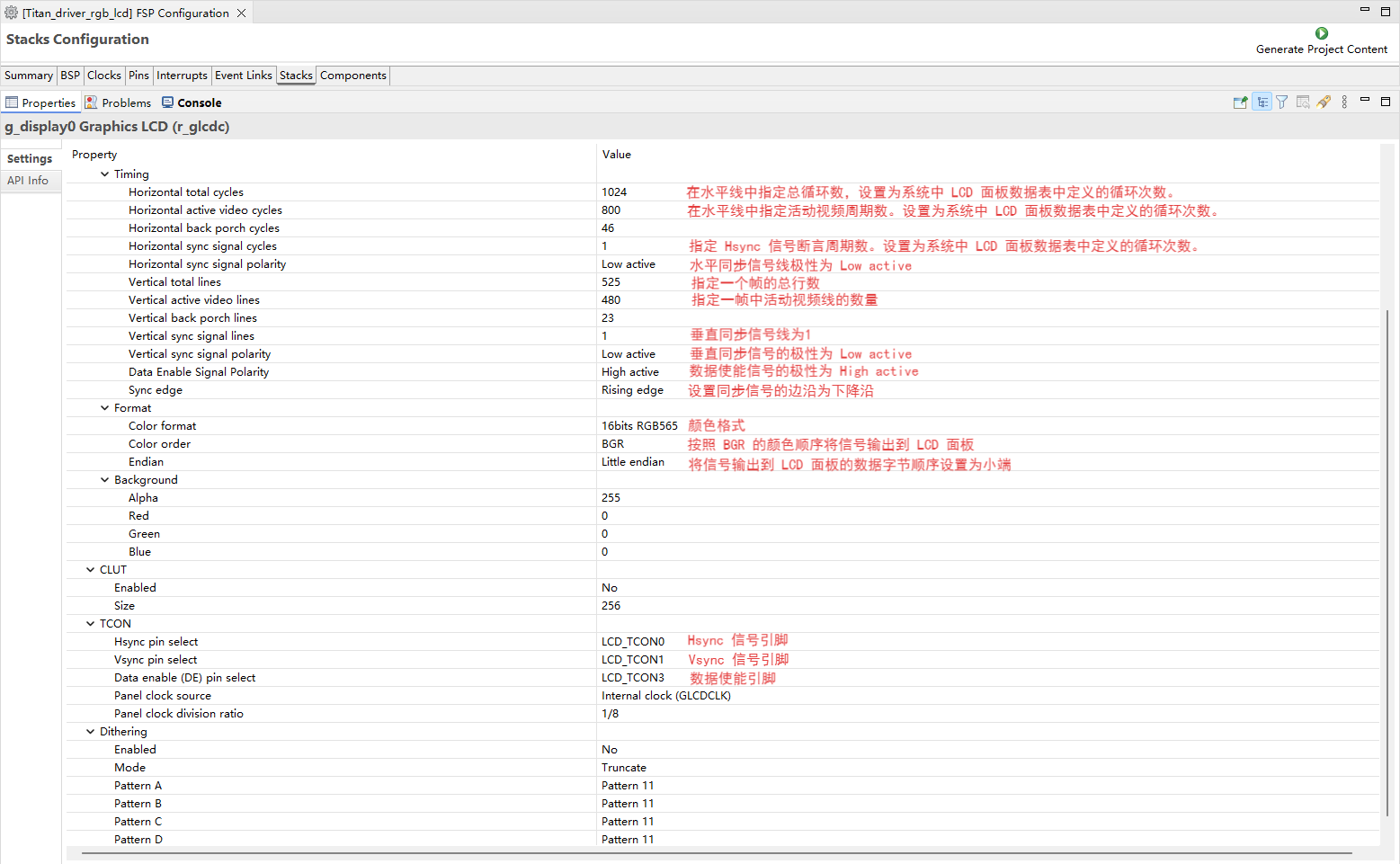
Configure output parameters, CLUT, TCON.
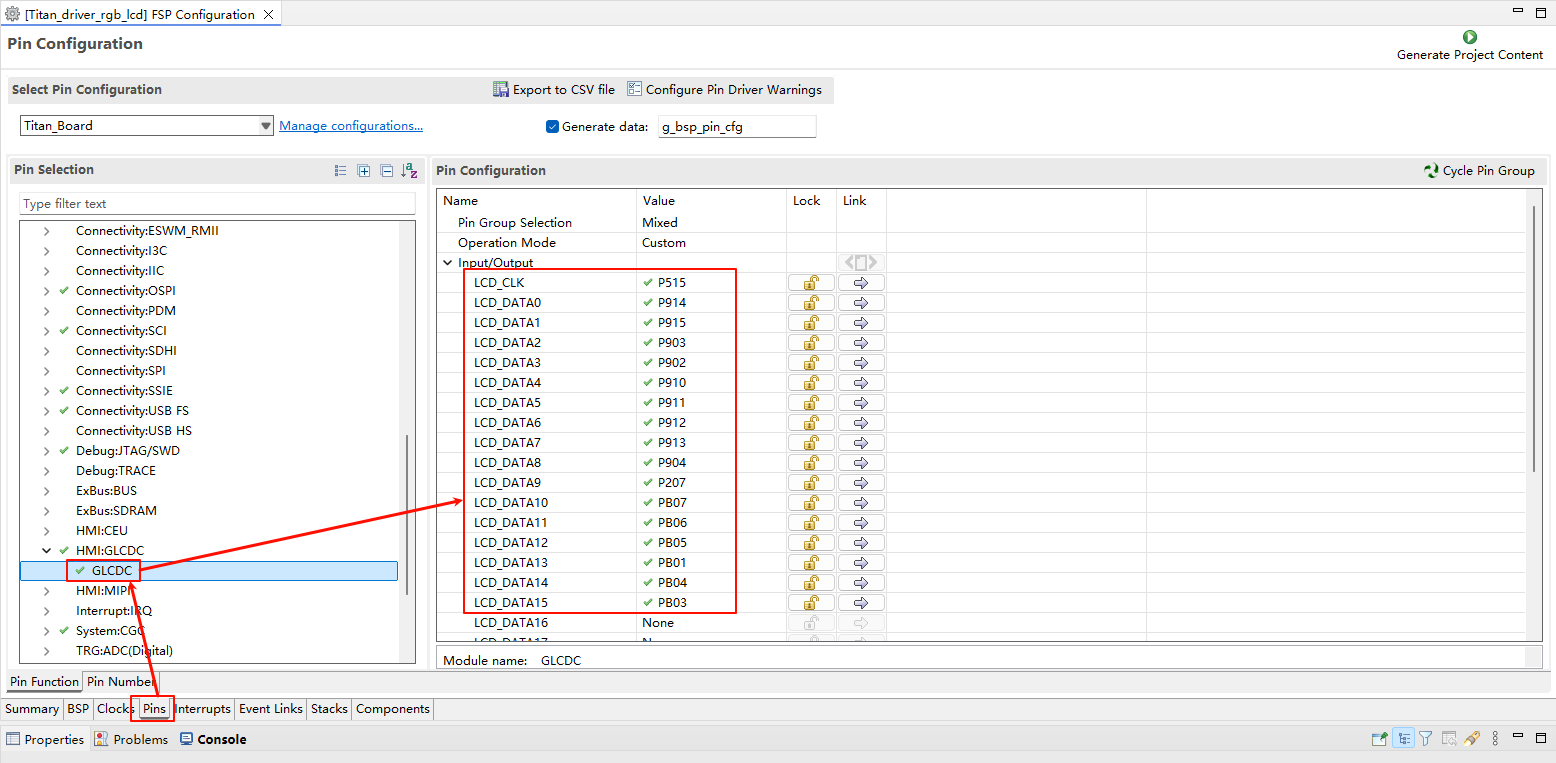
Configure GLCDC pins:
LCD Backlight Configuration
Create a
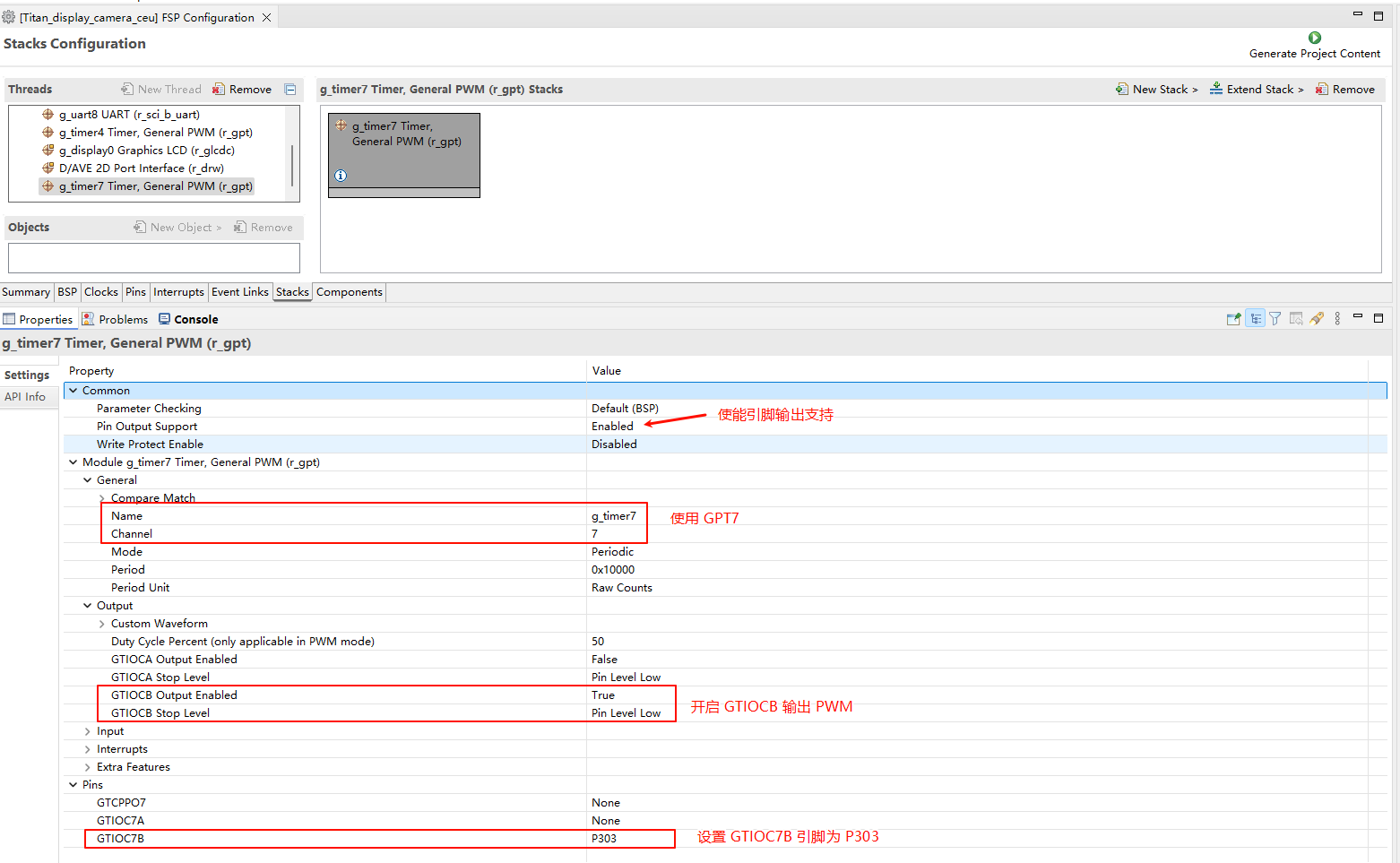
r_gptstack:
Configure backlight PWM output:
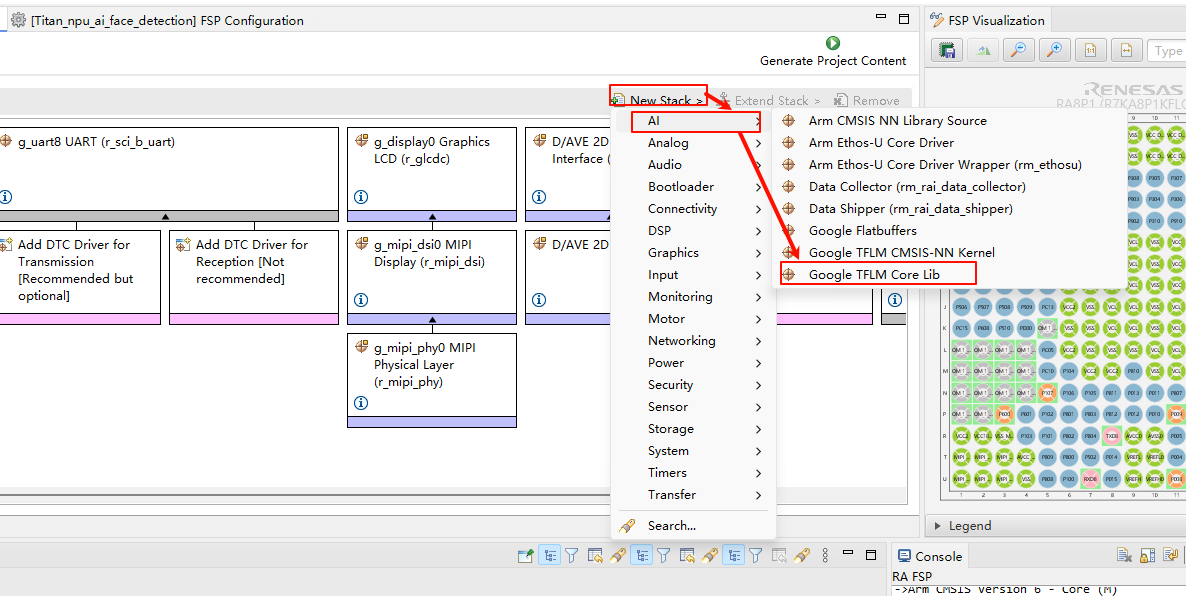
NPU Configuration
Create Google TFLM Core Lib stack:
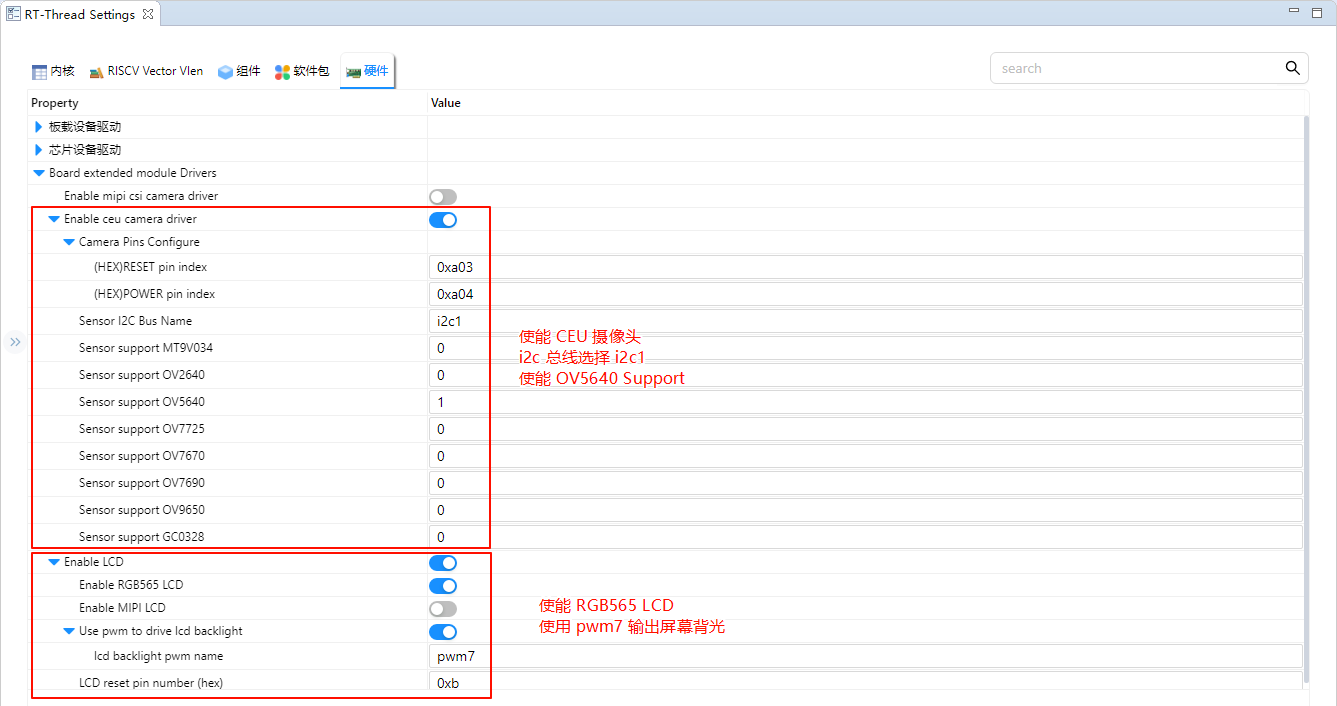
RT-Thread Settings Configuration
Enable the CUE camera, using the i2c1 and ov5640 cameras; Enable RGB565 LCD and use pwm7 output backlight.
Build & Download
RT-Thread Studio: In RT-Thread Studio’s package manager, download the Titan Board resource package, create a new project, and compile it.
After compilation, connect the development board’s USB-DBG interface to the PC and download the firmware to the development board.
Run Effect
After resetting the Titan Board, prepare a face picture and place it in front of the camera. At this time, observe the LCD screen and you can see that the face is framed by a green rectangle.
