Edgi-Talk_LSM6DS3 Example Project
中文 | English
Introduction
This example is based on the Edgi-Talk platform, running on the RT-Thread real-time operating system, demonstrating how to drive the LSM6DS3 six-axis sensor (accelerometer + gyroscope + temperature).
LSM6DS3TR Overview
LSM6DS3TR is a low-power six-axis Inertial Measurement Unit (IMU) from STMicroelectronics, integrating a three-axis accelerometer and a three-axis gyroscope.
Key Features
Three-axis accelerometer: ±2/±4/±8/±16 g
Three-axis gyroscope: ±125/±245/±500/±1000/±2000 dps
Operating voltage: 1.71 V – 3.6 V
Low power consumption, supporting multiple power-saving modes
Built-in FIFO buffer (up to 8 KB)
Supports I²C and SPI communication interfaces
Applications
Smartphones and wearable devices
Motion detection and posture recognition
Gesture recognition and gait analysis
Robotics and drone attitude control
Through this example, users can learn to:
Use RT-Thread’s I²C device driver framework
Initialize and configure LSM6DS3 registers
Read three-axis acceleration, three-axis angular velocity, and temperature data
Output sensor data via the serial port
Hardware Description
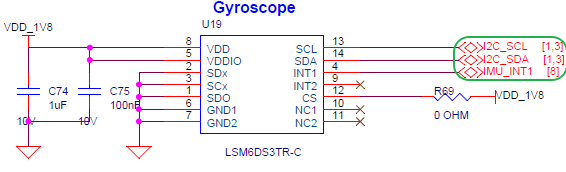
LSM6DS3TR Interface
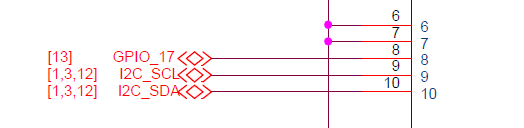
BTB Socket
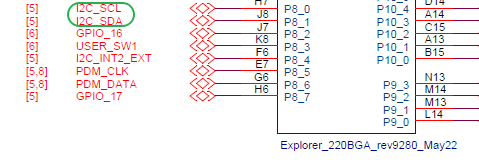
MCU Interface
Software Description
Developed on the Edgi-Talk platform
Uses RT-Thread as the OS kernel
Example features include:
Detect and verify device ID
Reset sensor and restore default configuration
Configure output data rate and full-scale range
Polling mode to read acceleration, angular rate, and temperature
Print sensor data to the serial terminal
Usage
Build and Download
Open the project and compile it.
Connect the board’s USB interface to the PC using the onboard debugger (DAP).
Flash the generated firmware to the board using a programming tool.
Running Result
After flashing, power on the board to run the example:
Acceleration [mg]: 15.23 -3.12 1000.45
Angular rate [mdps]: 2.50 -1.25 0.75
Temperature [degC]: 26.54
The blue LED will blink at a 500ms period, indicating that the system scheduler is running normally.
Notes
To modify the graphical configuration, open the configuration file using the following tool:
tools/device-configurator/device-configurator.exe
libs/TARGET_APP_KIT_PSE84_EVAL_EPC2/config/design.modus
After modification, save the configuration and regenerate the code.
Startup Sequence
The system starts in the following order:
+------------------+
| Secure M33 |
| (Secure Core) |
+------------------+
|
v
+------------------+
| M33 |
| (Non-Secure Core)|
+------------------+
|
v
+-------------------+
| M55 |
| (Application Core)|
+-------------------+
⚠️ Please strictly follow the above flashing sequence; otherwise, the system may fail to run properly.
If the example does not run correctly, first compile and flash the Edgi-Talk_M33_S_Template project to ensure proper initialization and core startup, then run this example.
To enable the M55 core, enable the following configuration in the M33 project:
RT-Thread Settings --> Hardware --> select SOC Multi Core Mode --> Enable CM55 Core