NPU 加速人脸检测使用说明
中文 | English
简介
本示例展示了如何在 Titan Board 上,利用 Arm® Ethos™-U55 NPU 加速运行 YOLO-Fastest 人脸检测模型,并结合 CEU(Camera Engine Unit)摄像头接口 和 RGB LCD 显示屏 实现实时人脸检测与显示。
主要功能包括:
通过 CEU 采集实时视频流(OV5640 摄像头)
使用 NPU 对视频帧进行 YOLO-Fastest 模型推理
在 LCD 屏幕上显示检测结果(带人脸框)
支持硬件加速的 YUV → RGB 转换与图形绘制
系统整体架构
本示例的系统数据流如下图所示:
[OV5640 摄像头]
│
▼
[CEU 摄像头采集模块]
│ (YUV422)
▼
[DMA 传输到 Frame Buffer (HyperRAM)]
│
├──► [NPU (Ethos-U55) 运行 YOLO-Fastest 推理]
│ │
│ ▼
│ [检测结果:坐标 + 置信度]
│
└──► [GLCDC 显示控制器]
│
▼
[RGB LCD 实时显示]
Arm® Ethos™-U55 NPU 特性
Titan Board 使用的 RA8P1 MCU 集成 Arm® Ethos™-U55 神经处理单元(NPU),可与 Cortex-M85 CPU 协同工作,大幅提升神经网络推理性能。
1. 硬件特性
算力与加速
支持 INT8 量化模型
性能可达数百 GOPS(依型号配置)
支持卷积、池化、ReLU、Softmax 等常见算子
与 CPU 协同
通过 CMSIS-NN & Ethos-U 驱动与 Cortex-M85 协作
支持 NPU 与 CPU 异步执行
模型前后处理由 CPU 完成
存储与带宽
支持从片上 SRAM 或外部 HyperRAM 直接读取特征图
DMA 加速模型输入/输出数据搬运
支持多层缓存机制减少延迟
兼容性
与 TensorFlow Lite for Microcontrollers (TFLM) 完全兼容
支持 Arm NN SDK 转换的模型格式 (.tflite)
YOLO-Fastest 模型介绍
YOLO-Fastest 是轻量级目标检测网络,适合嵌入式设备实时运行。
项目 |
参数 |
|---|---|
模型类型 |
YOLO-Fastest(人脸检测版本) |
模型框架 |
TensorFlow Lite (INT8) |
输入尺寸 |
192 x 192 |
输出 |
人脸检测框坐标 + 置信度 |
推理时间(Ethos-U55) |
约 25 ms / 帧 |
适用场景 |
人脸检测 / 实时视觉识别 |
硬件说明
CEU 摄像头连接方式如下:
使用 22Pin 异向排线连接开发板的 CEU_CAM 排线座与摄像头转接板的 DVP 排线座。

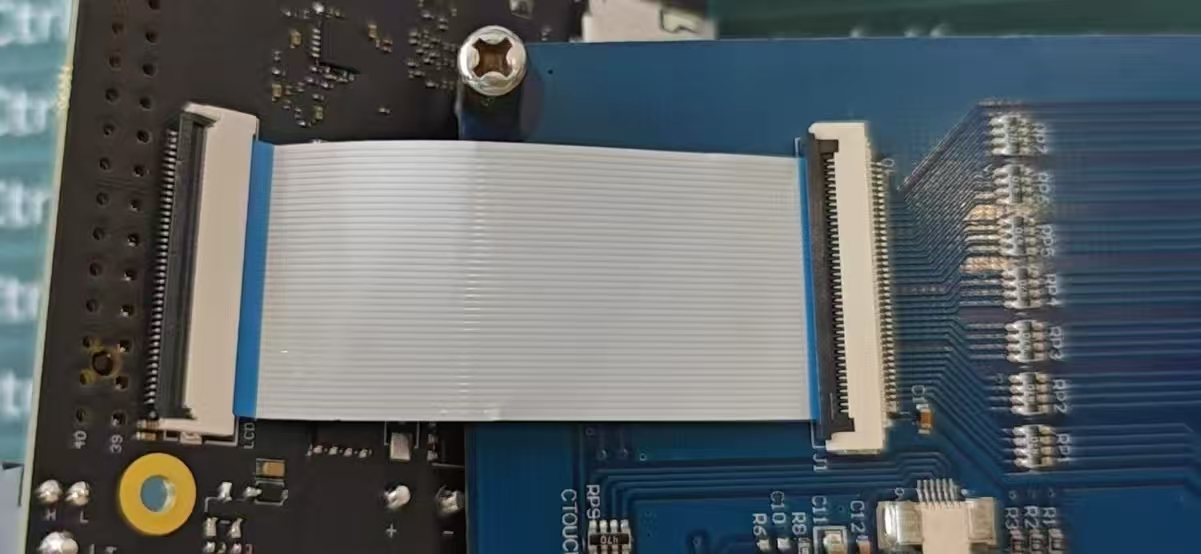
RGB LCD连接方式如下:
屏幕型号:正点原子 4.3寸 RGBLCD 800*480
使用 40Pin 同向排线连接开发板的 LCD_RGB 排线座与屏幕。
FSP 配置
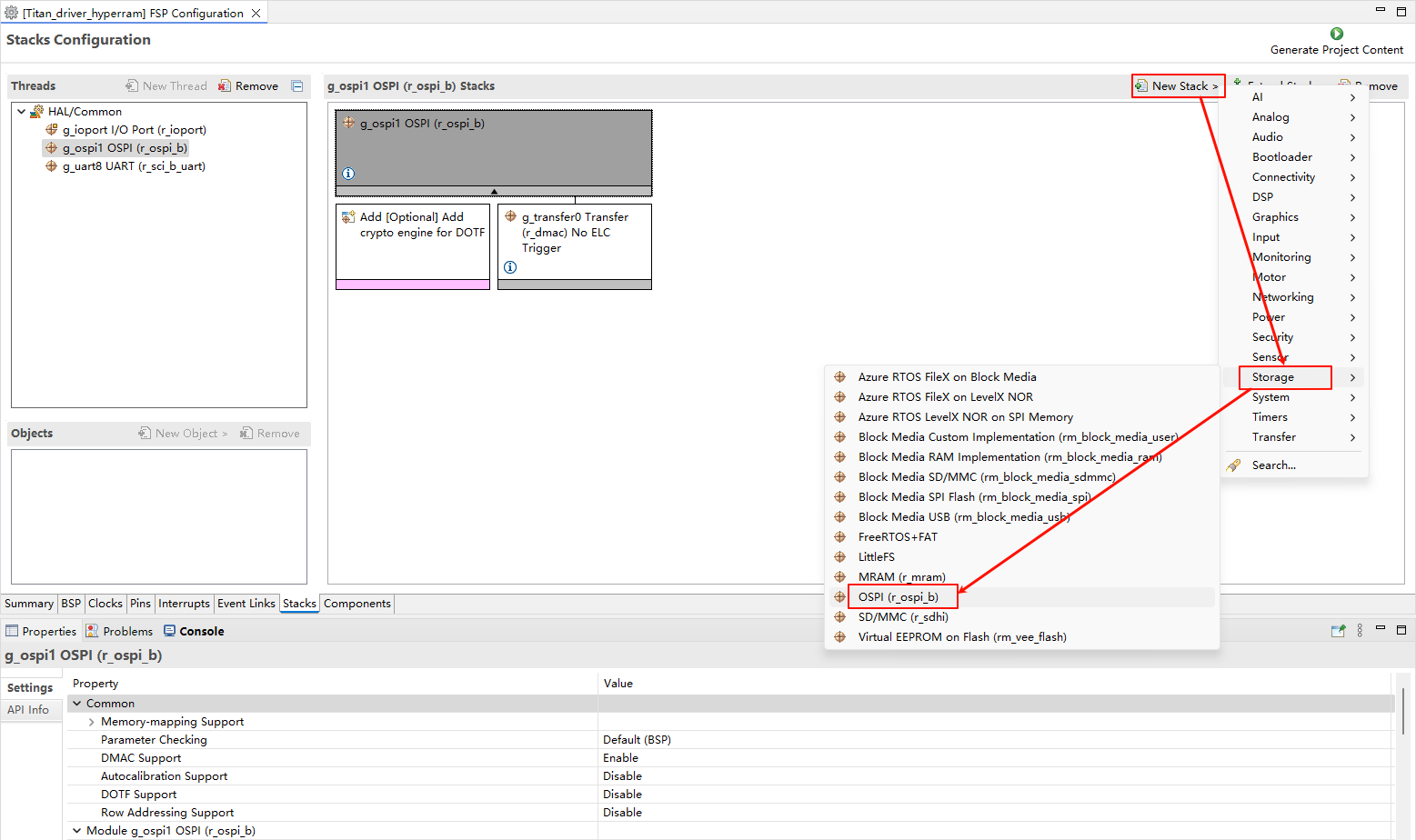
HyperRAM 配置
新建 r_ospi_b stack:
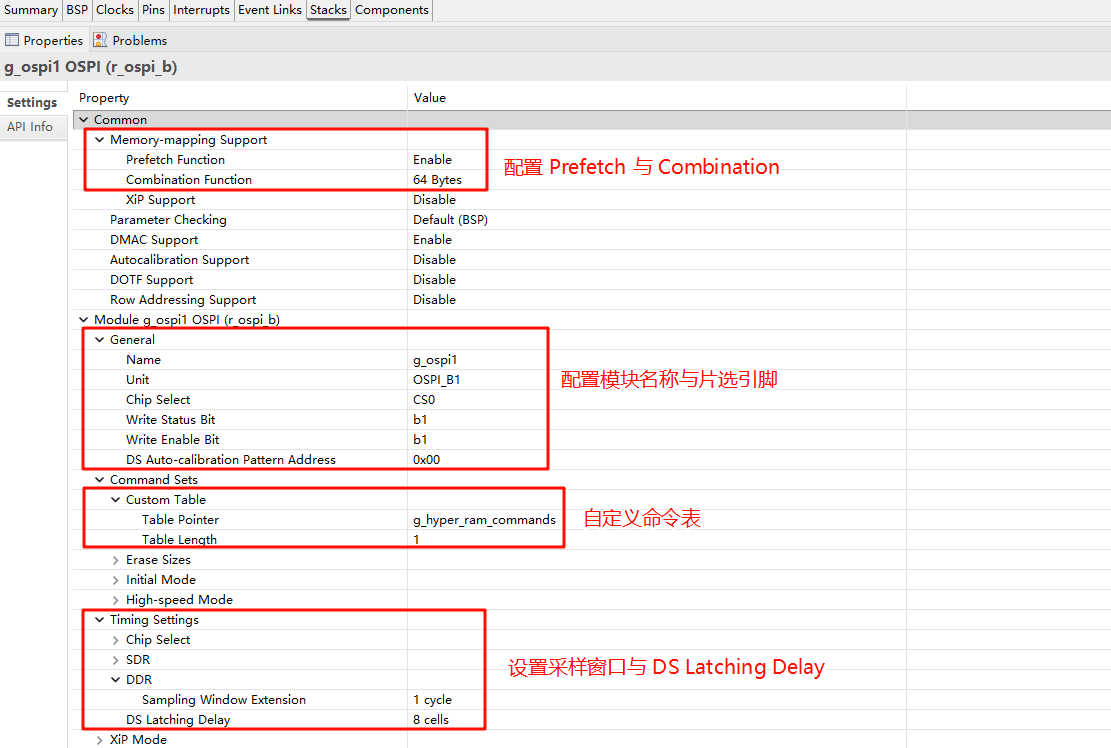
配置 r_ospi_b stack:
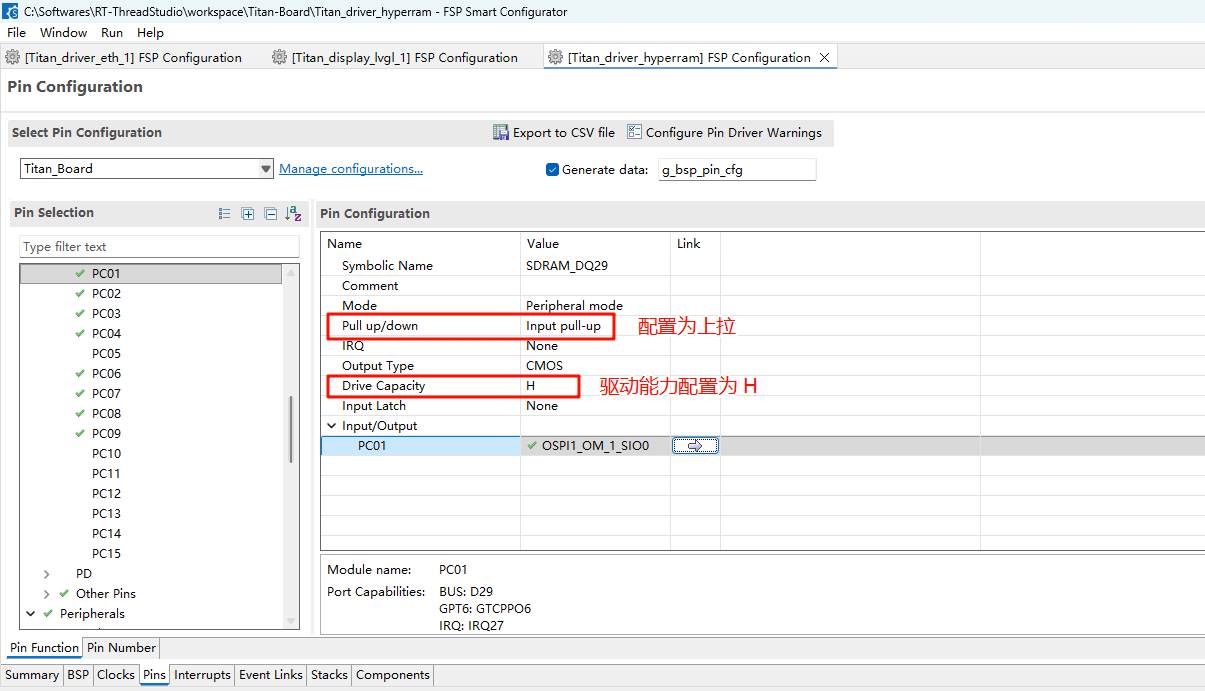
HyperRAM 引脚配置:
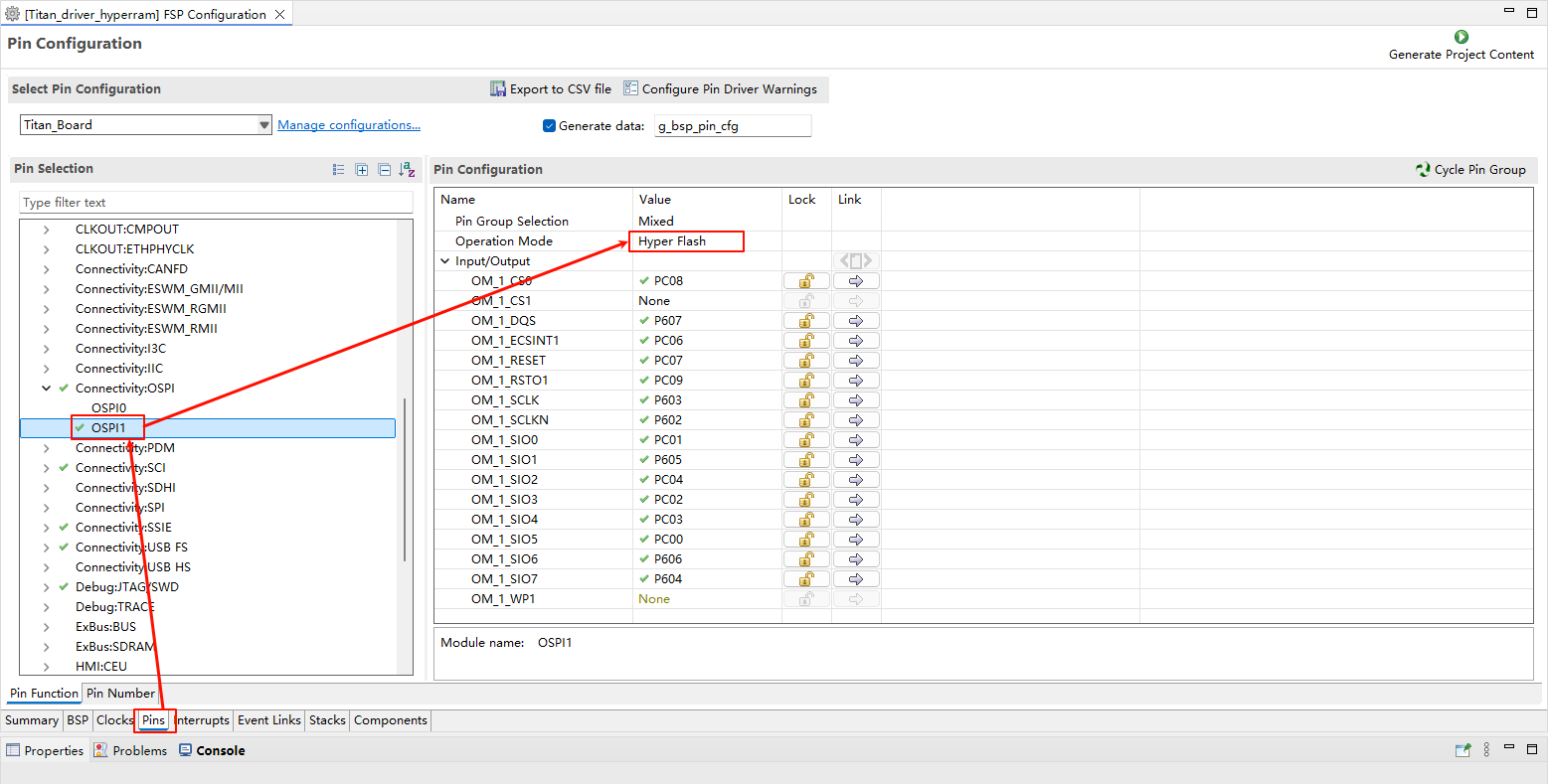
HyperRAM 所有相关引脚的驱动能力配置为 H,OM_1_SIO0~OM_1_SIO7 需要配置为输入上拉。
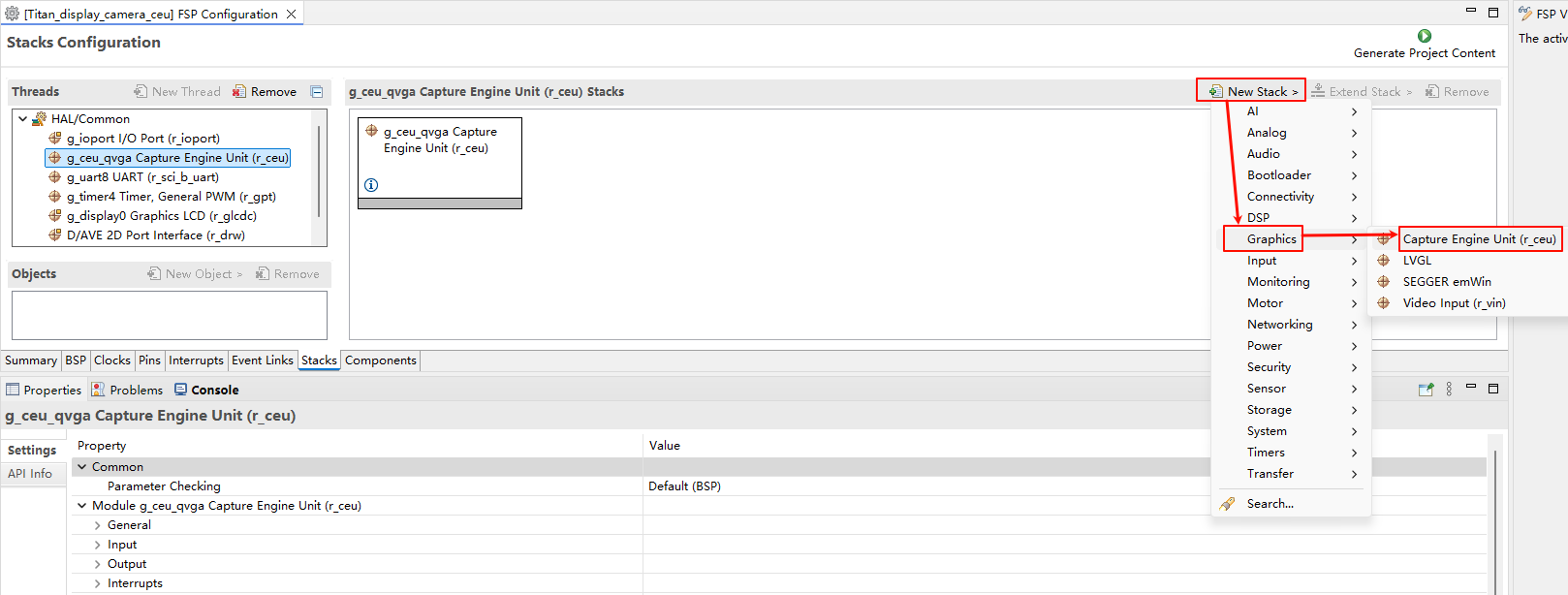
CEU 配置
新建
r_ceustack:
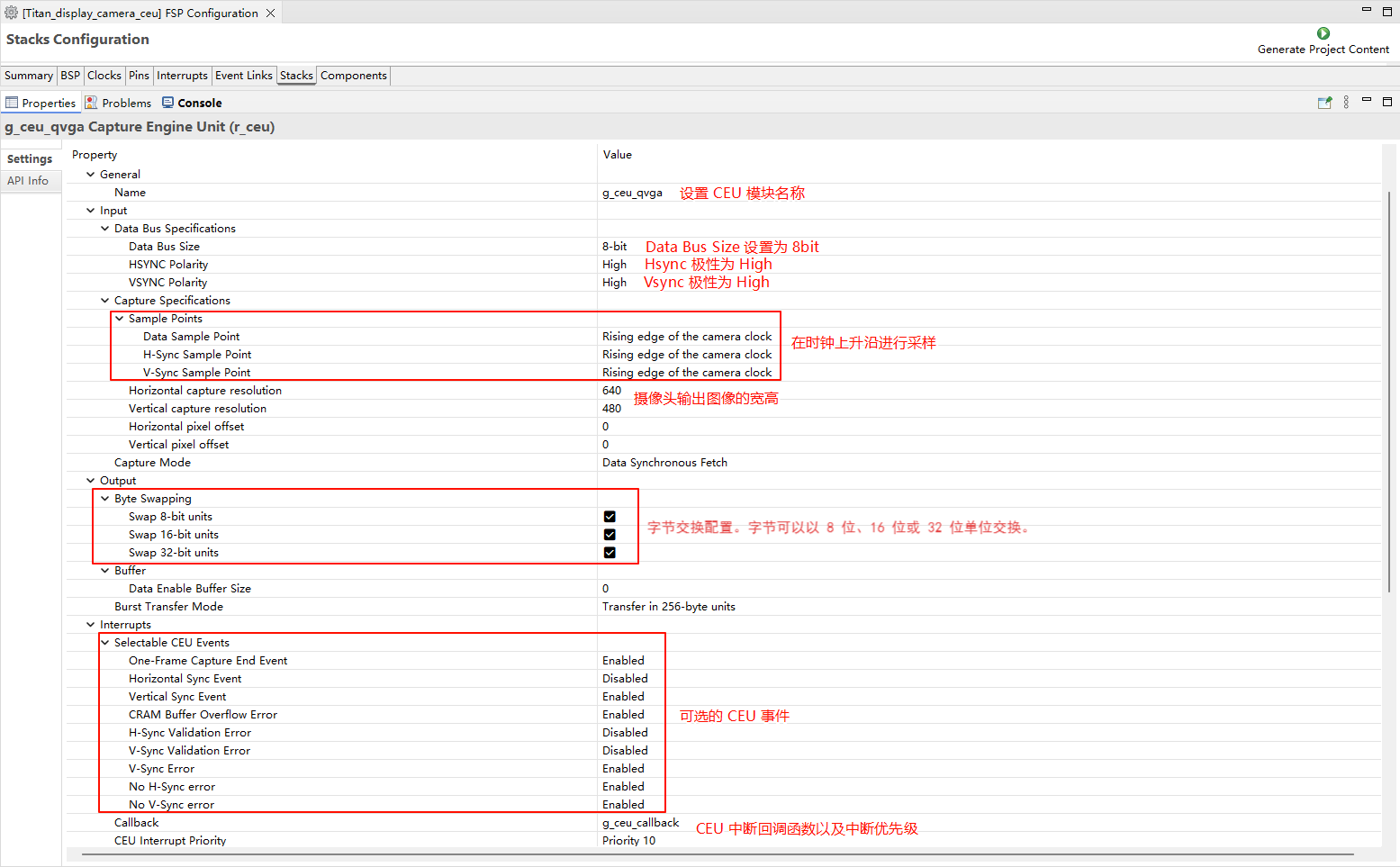
配置 CEU:
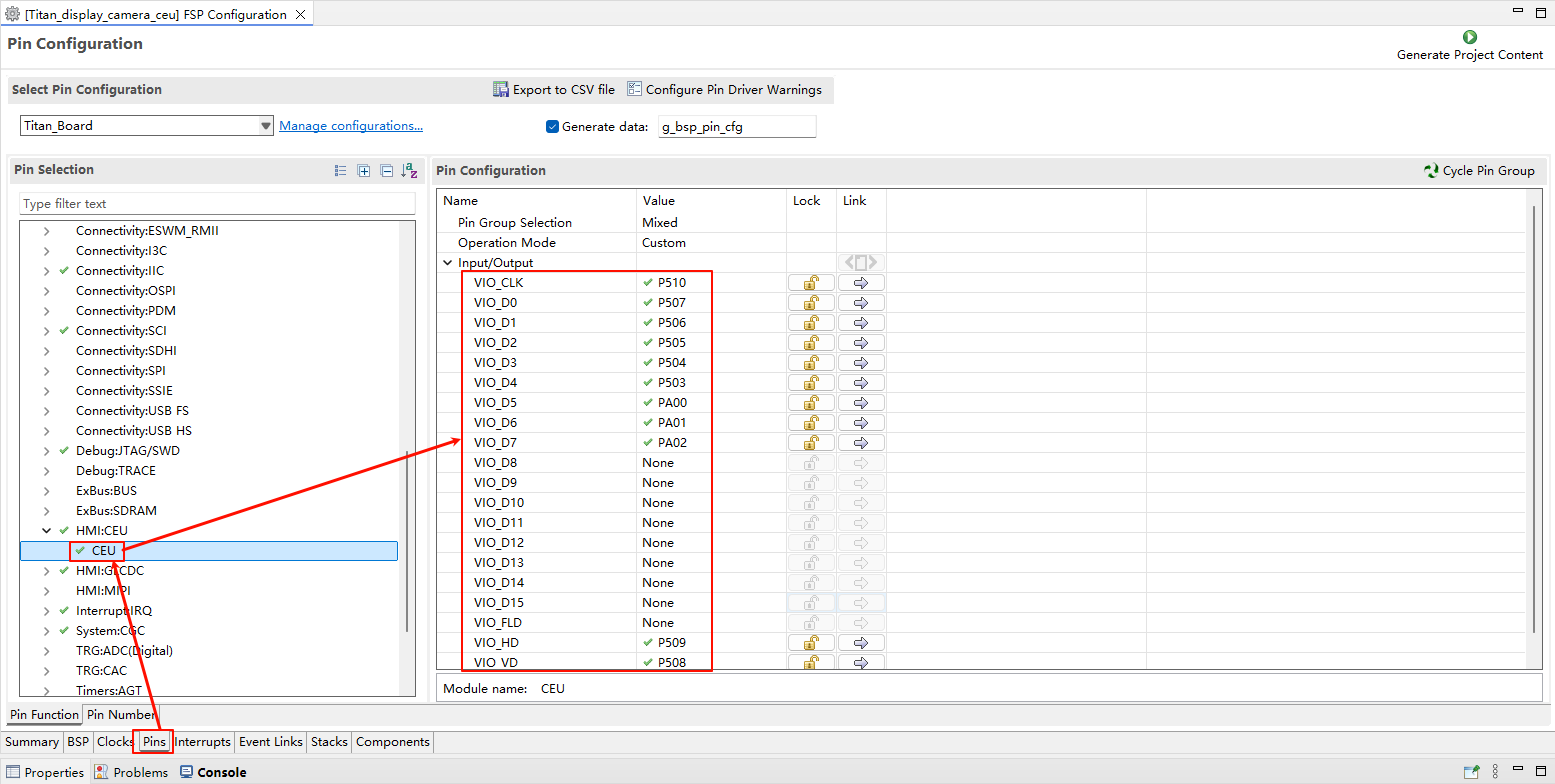
配置 CEU 引脚:
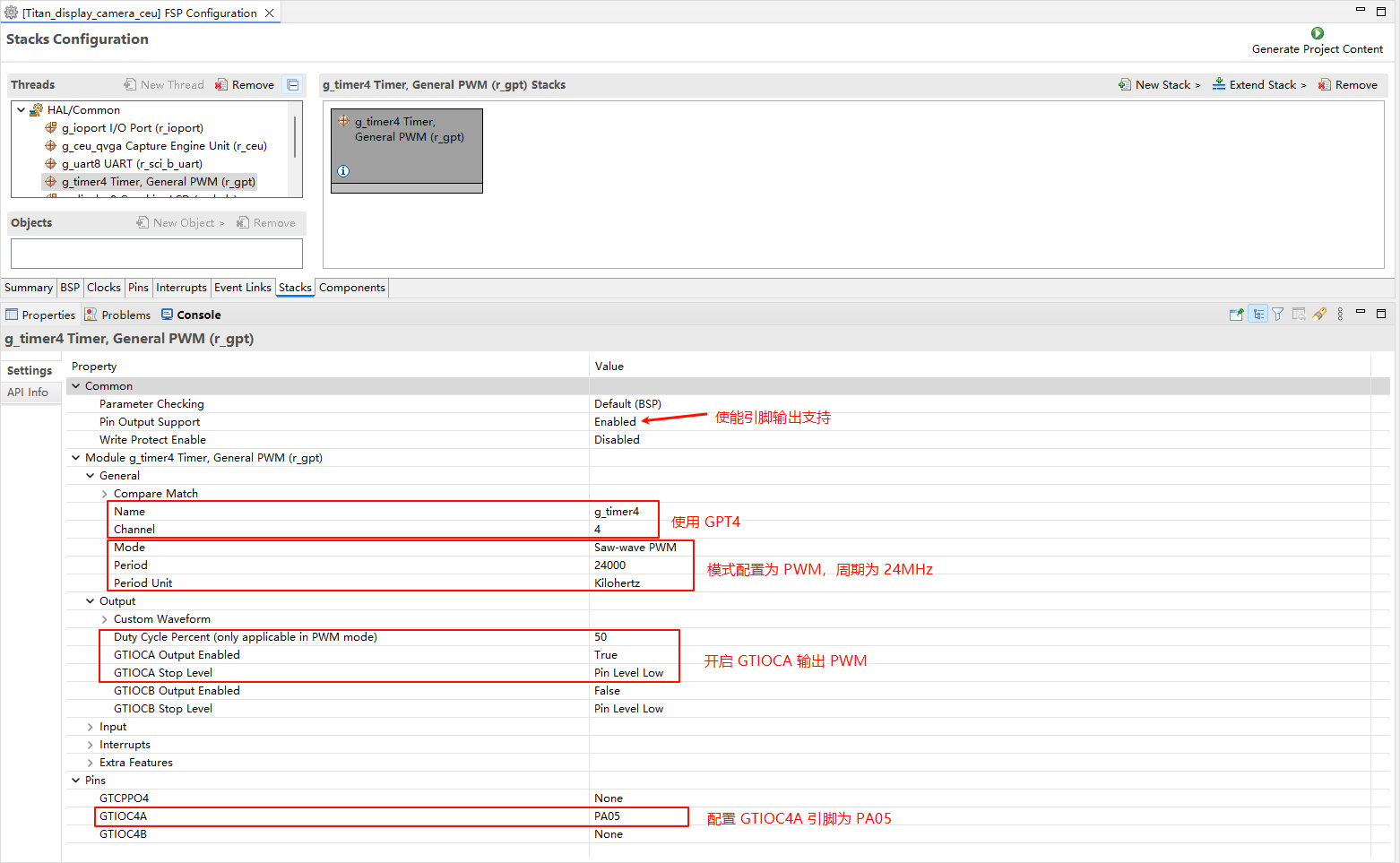
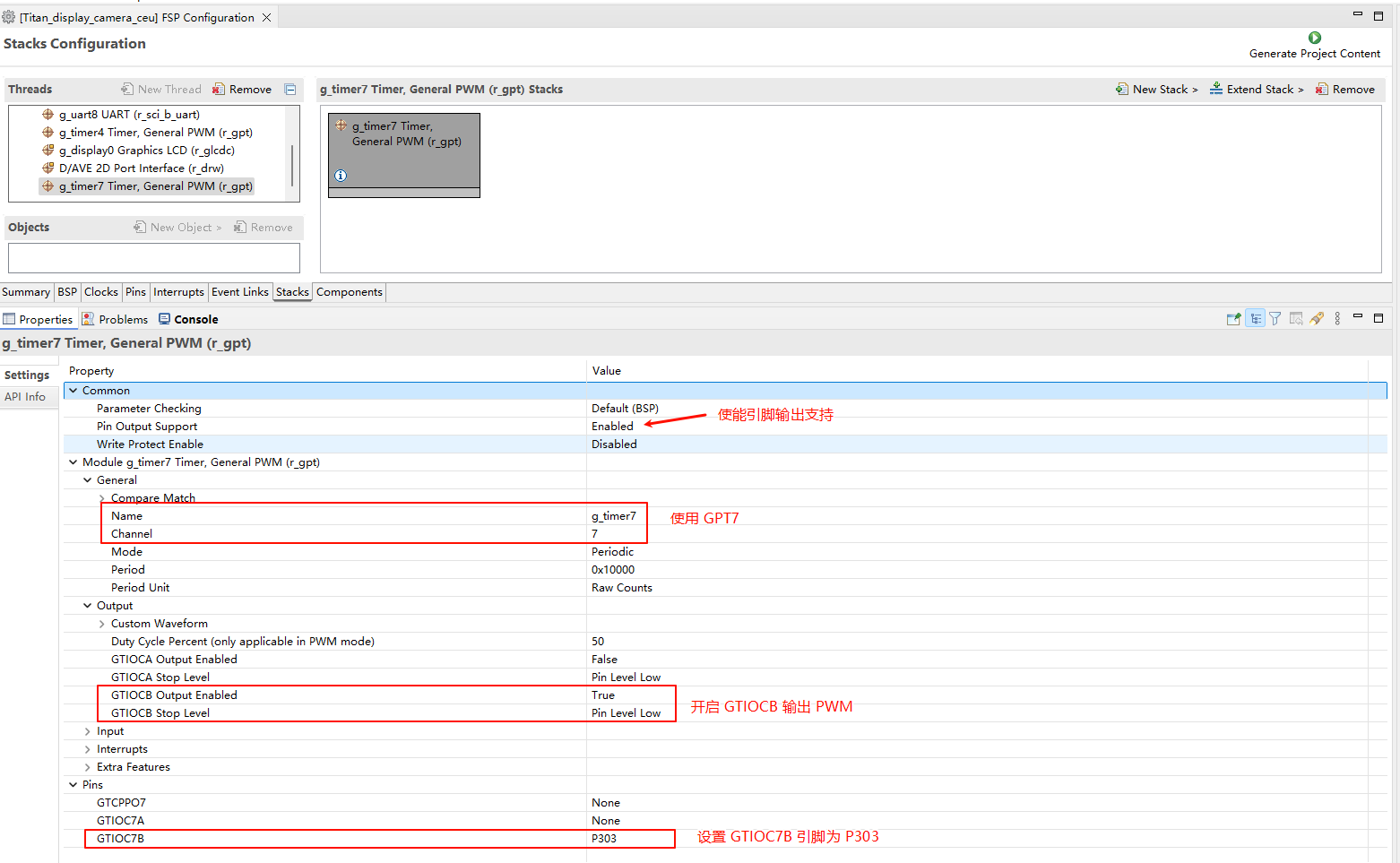
CEU 时钟配置
新建
r_gptstack:
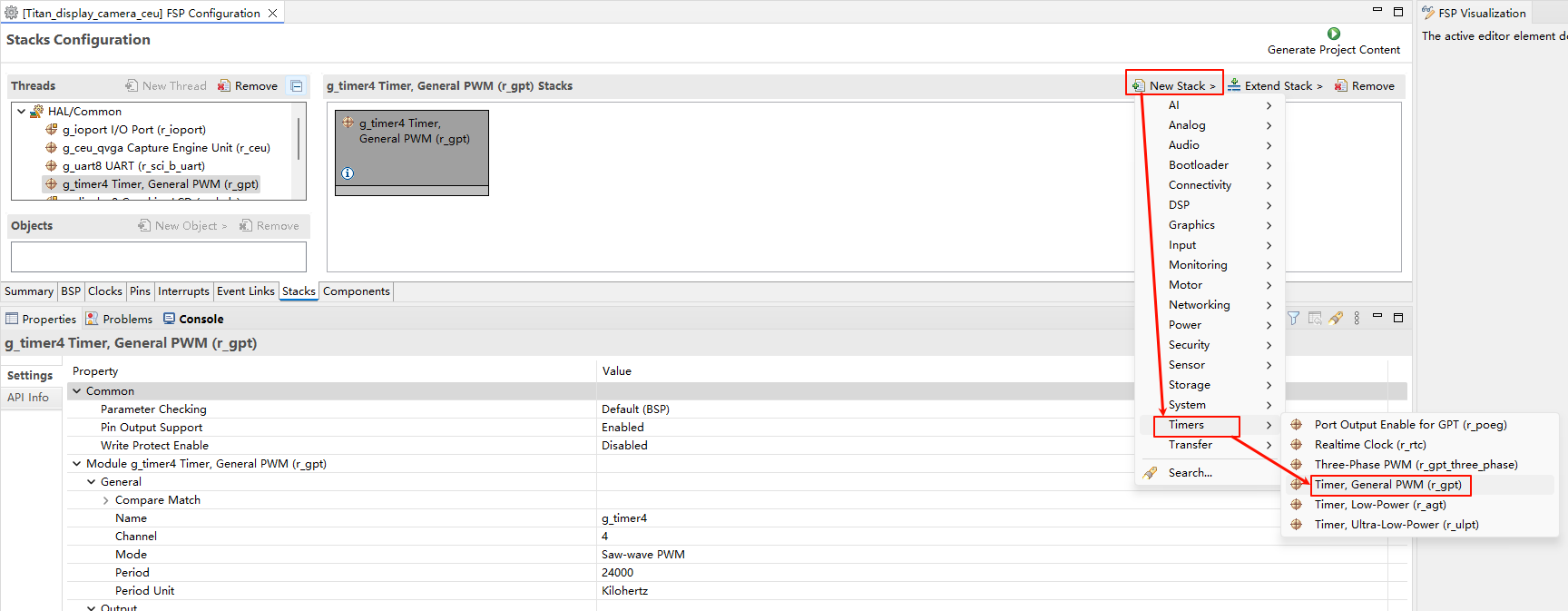
配置摄像头时钟 PWM 输出:
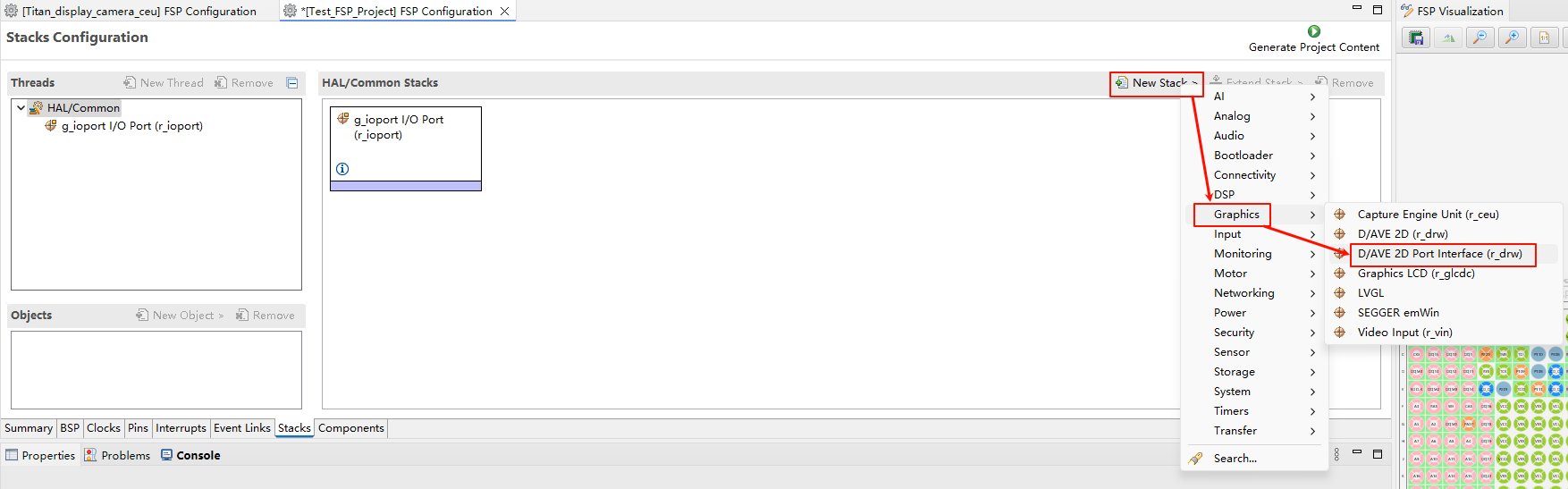
D/AVE 2D 配置
新建
r_drwstack:
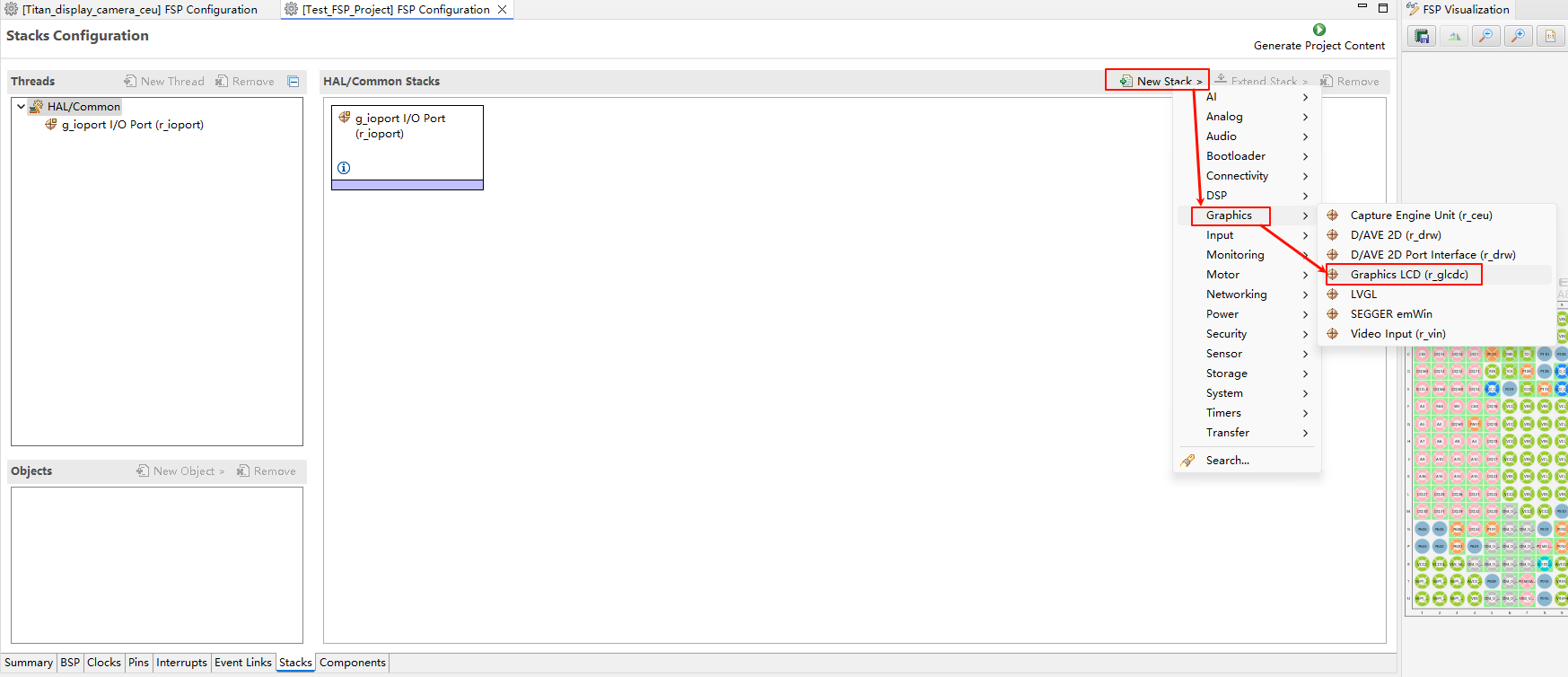
RGB LCD 配置
新建
r_glcdcstack:
配置中断回调和图形层1:
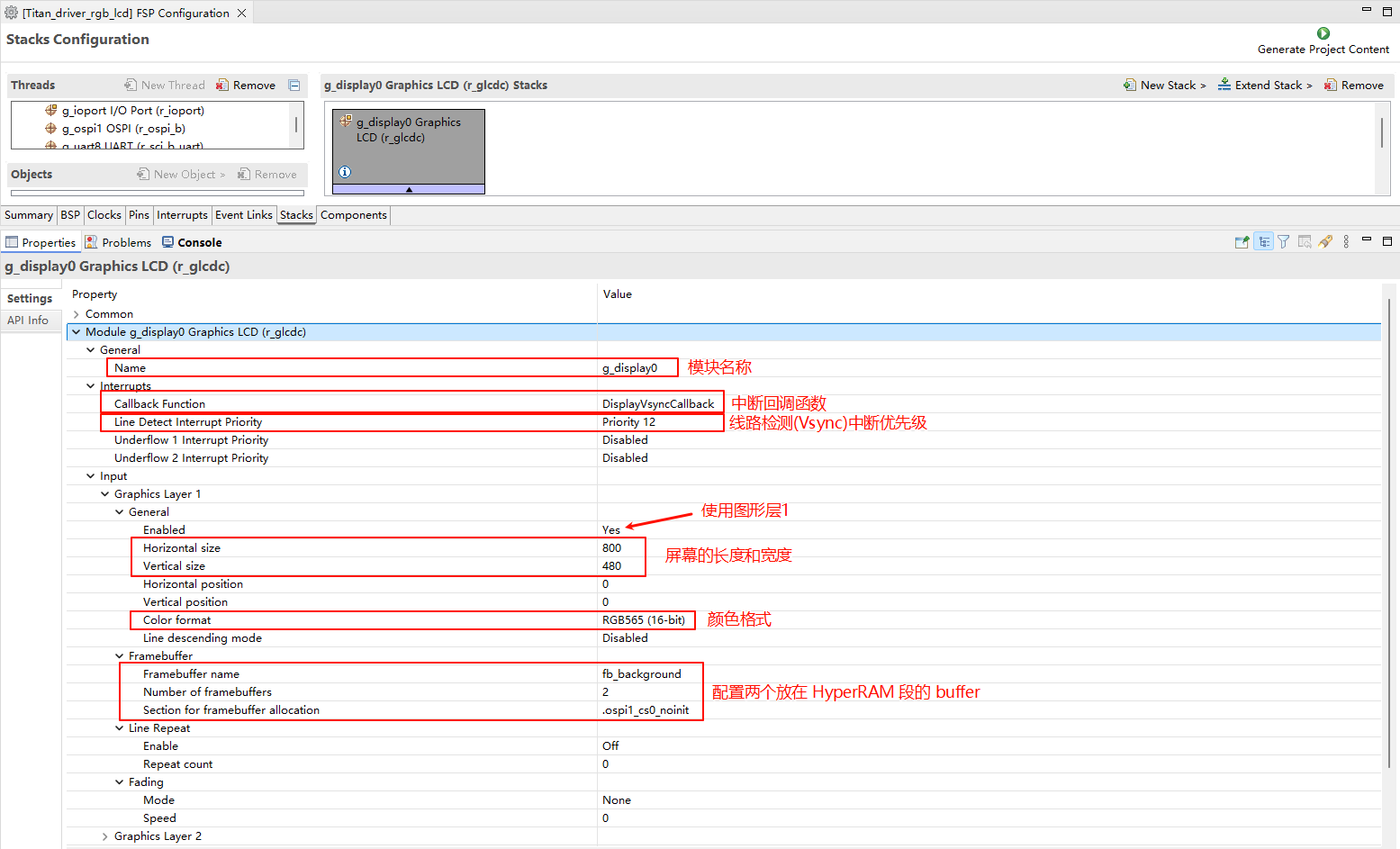
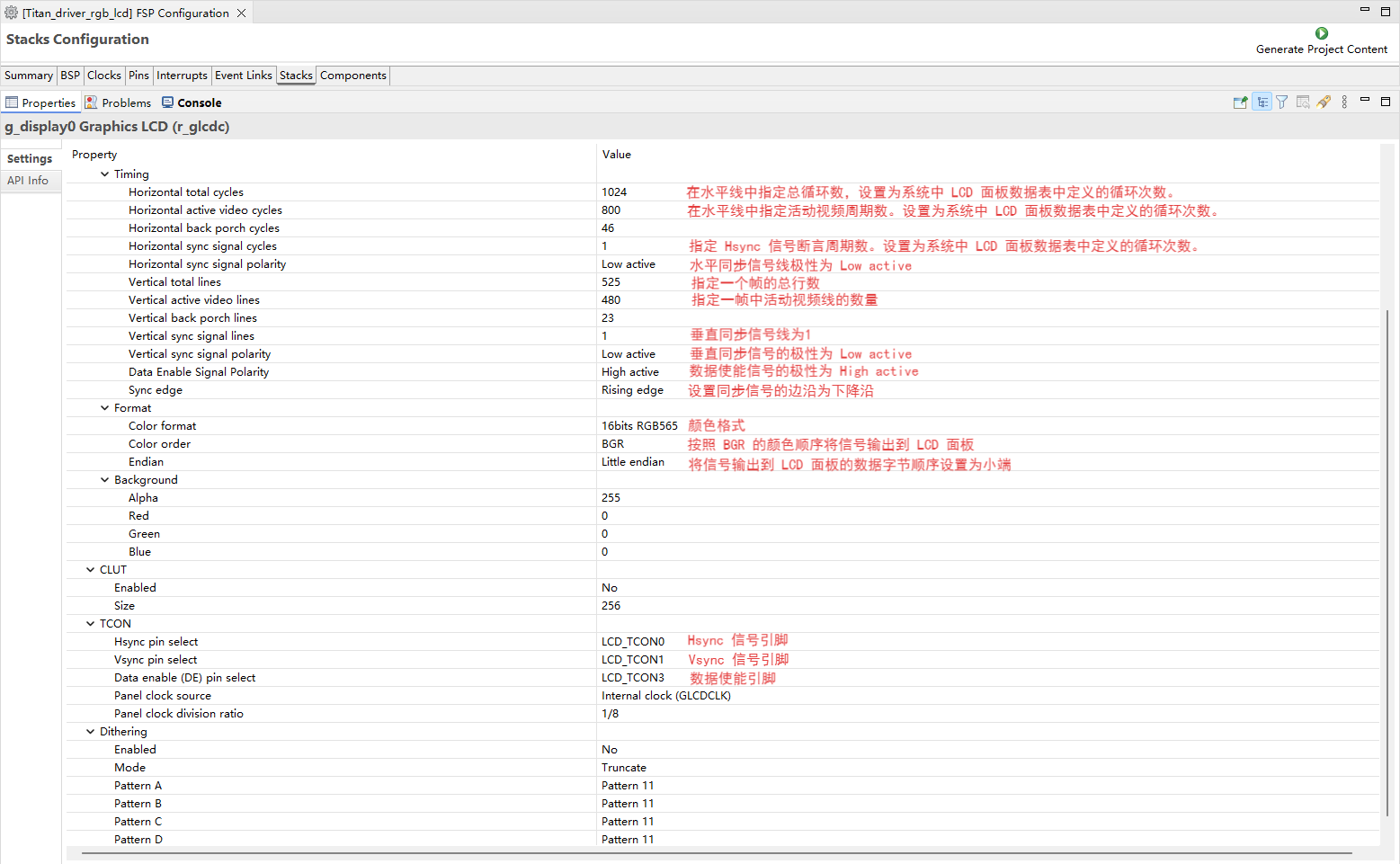
配置输出参数、CLUT、TCON和抖动。
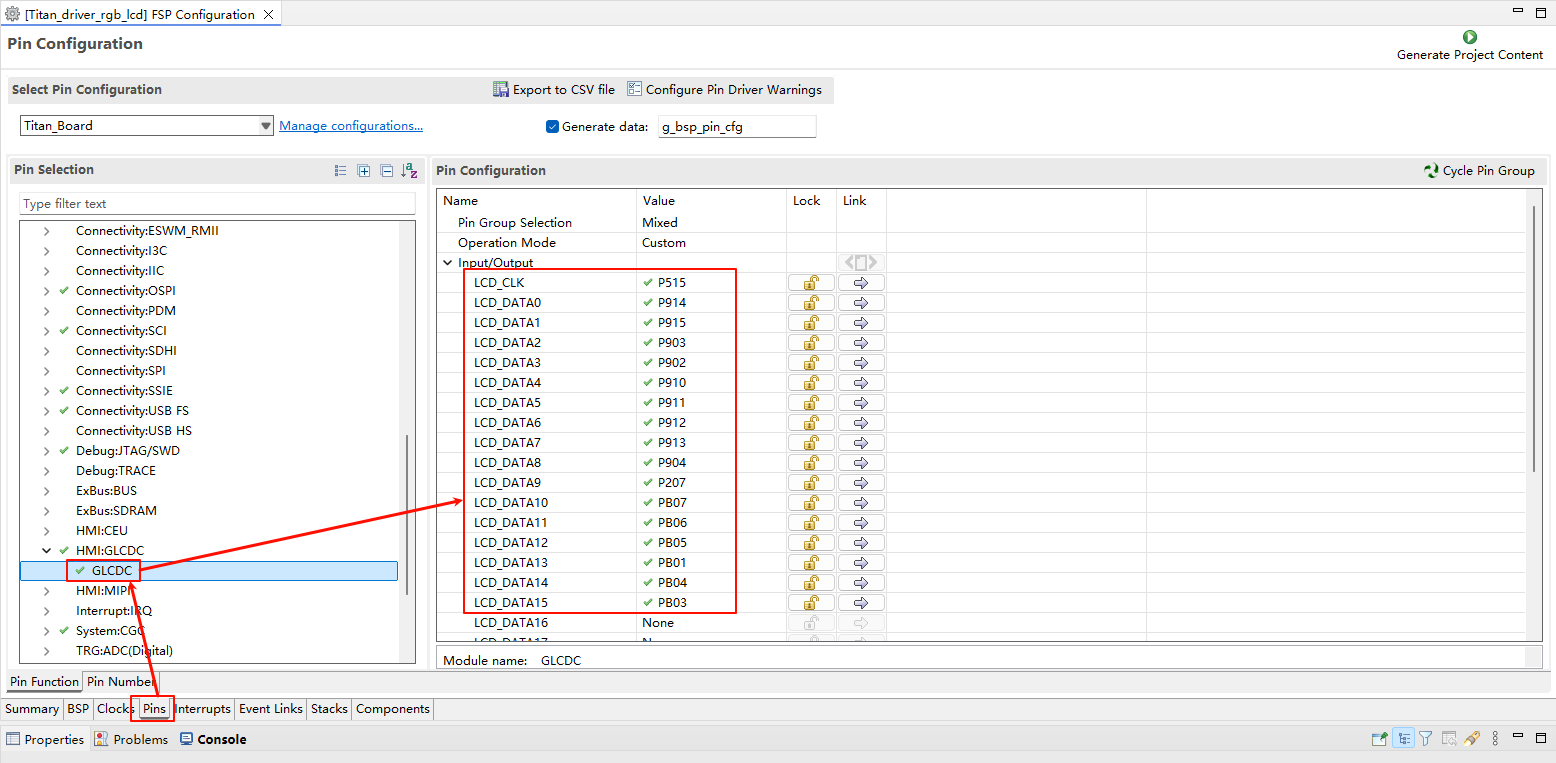
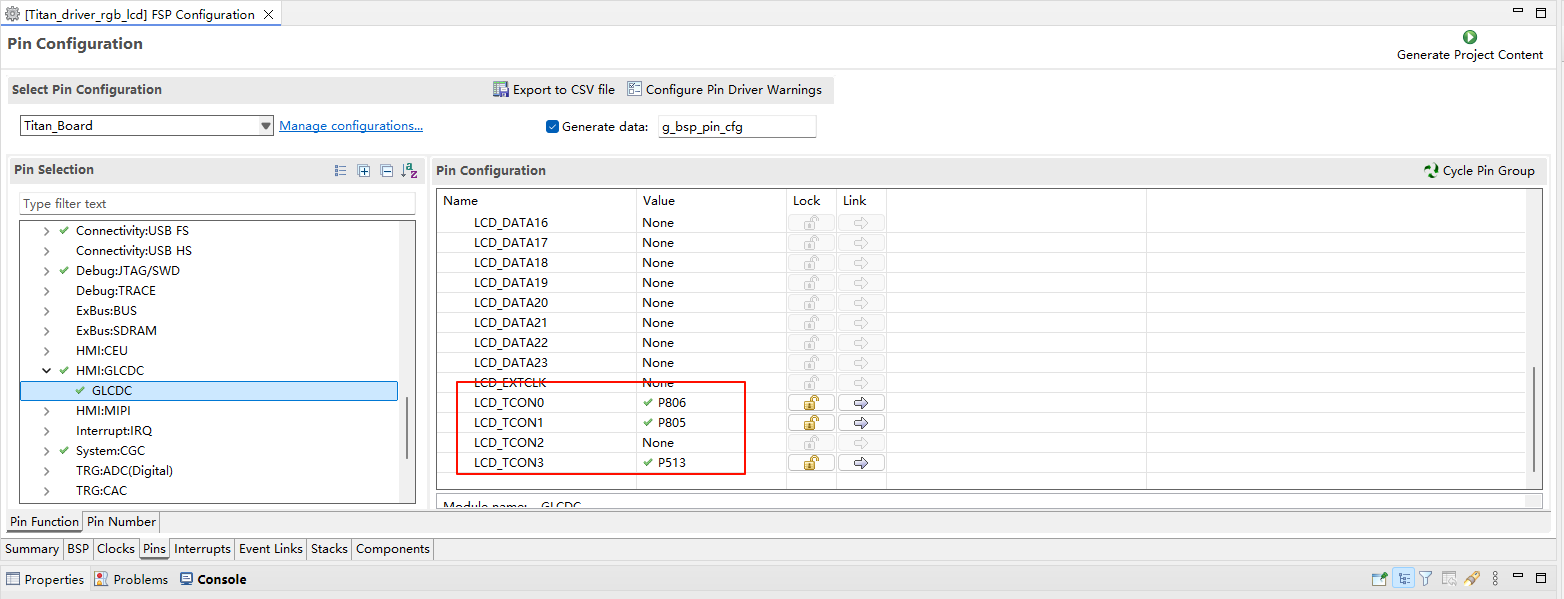
配置 GLCDC 的引脚:
LCD 背光配置
新建
r_gptstack:
配置背光 PWM 输出:
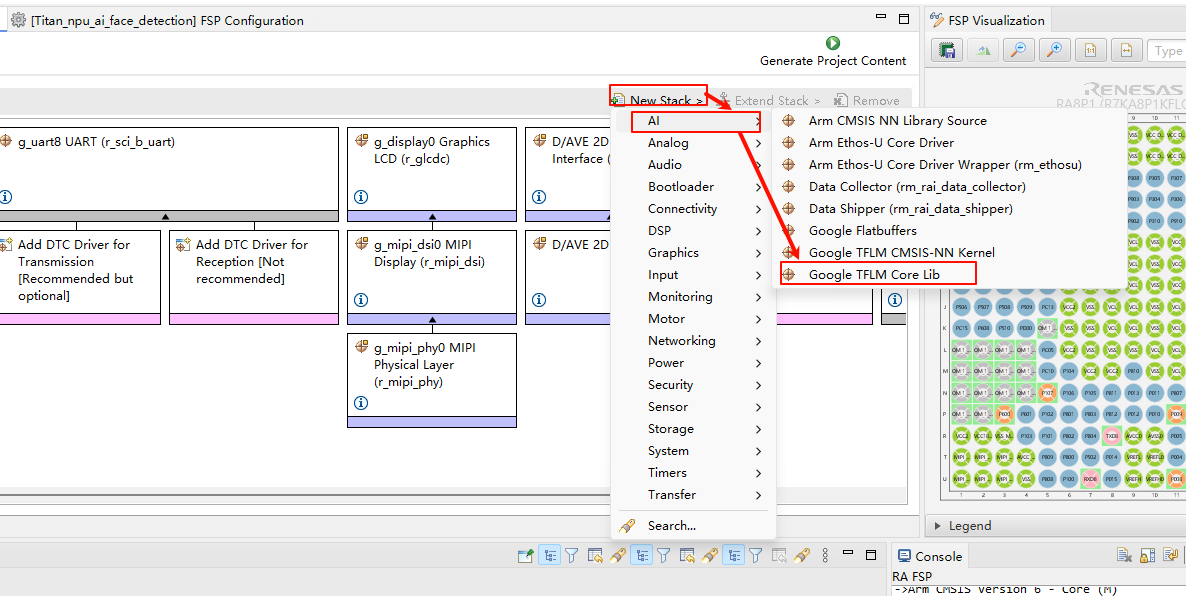
NPU 配置
创建 Google TFLM Core Lib stack:
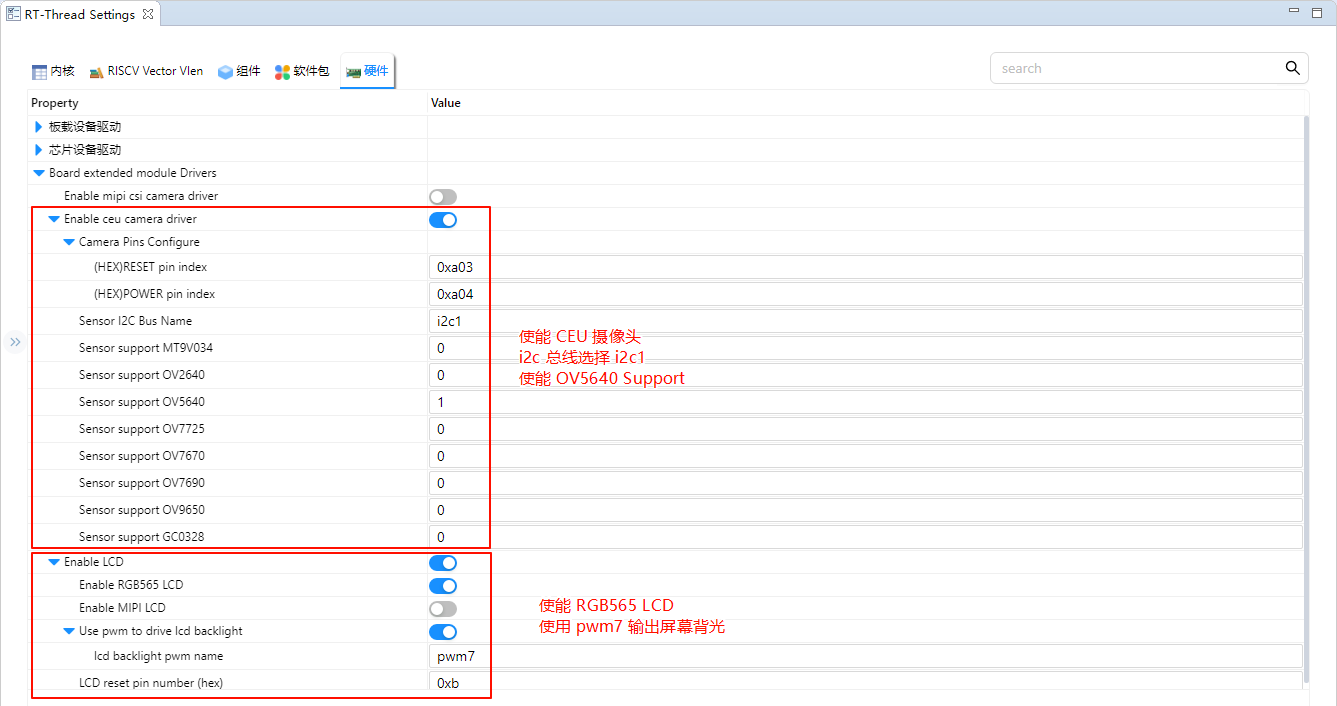
RT-Thread Settings 配置
使能 CUE 摄像头,使用 i2c1 和 ov5640 摄像头;使能 RGB565 LCD,使用 pwm7 输出背光。
编译&下载
RT-Thread Studio:在RT-Thread Studio 的包管理器中下载 Titan Board 资源包,然后创建新工程,执行编译。
编译完成后,将开发板的 USB-DBG 接口与PC 机连接,然后将固件下载至开发板。
运行效果
复位 Titan Board 后准备一张人脸图片放到摄像头面前,此时观察 LCD 屏幕能看到人脸被一个绿色的矩形框了出来。
