CEU 摄像头使用说明(MIPI LCD)
中文|English
简介
本示例展示了如何在 Titan Board 上使用 CEU(Camera Engine Unit) 接口连接 OV5640 摄像头,并通过 RT-Thread LCD 框架 将捕获的图像显示到 MIPI LCD 屏幕(型号为 TL043WVV02CT)。
主要功能包括:
初始化 CEU 摄像头接口,捕获实时视频流
配置 OV5640 摄像头参数(分辨率、帧率、输出格式)
使用 RT-Thread LCD 驱动显示摄像头捕获的图像
支持图像格式转换(YUV422 → RGB565)
RA8 系列 CEU(Camera Engine Unit)特性
RA8 系列 MCU 内置 CEU 硬件模块,用于高效捕获摄像头图像数据,并支持多种图像格式和分辨率,直接将数据传输到内存或显示接口。
1. CEU 硬件接口特性
接口类型
DVP(Digital Video Port) 接口,用于连接 CMOS 摄像头
支持 8/10/12 位数据总线
同步信号:
PCLK:像素时钟
HSYNC:行同步信号
VSYNC:帧同步信号
输入分辨率与帧率
支持 VGA、QVGA、SXGA、UXGA 等常用分辨率
帧率支持 1–60 fps,可配置以适应不同应用
摄像头兼容性
与 OV5640、OV7670 等常用 CMOS 摄像头兼容
支持自动初始化和寄存器配置
2. 图像格式与处理能力
图像格式支持
YUV422(常用用于视频传输)
RGB565(适合 LCD 显示)
RAW10/RAW12(用于图像处理和算法开发)
图像处理功能
颜色空间转换:YUV ↔ RGB
图像裁剪:可只采集部分 ROI(Region of Interest)
图像缩放:支持按比例缩小或放大
镜像与翻转:可水平或垂直镜像
硬件加速
CEU 内置硬件处理单元,可减轻 CPU 负担
提供快速图像格式转换和缩放功能
3. DMA 支持与缓冲机制
高速 DMA 传输
与 MCU 的 DMAC 配合,实现内存高速写入
支持直接将图像写入 Frame Buffer 或 LCD 缓冲区
多缓冲区机制
支持双缓冲或环形缓冲,保证连续视频采集
减少帧丢失和显示延迟
DMA 配置灵活
可配置缓冲区起始地址、大小
支持中断触发与回调
4. 中断机制
中断类型
帧完成中断(Frame End):每帧采集完成时触发
行中断(Line End,可选):每行采集完成时触发
错误中断:包括缓冲区溢出、同步信号异常
中断特点
支持 RT-Thread ISR 回调注册
可与 DMA 联动,实现实时处理和显示
5. 时序与同步特性
行/帧同步
HSYNC 对齐每行数据
VSYNC 对齐每帧图像
像素时钟
CEU 支持外部 PCLK 或内部分频
确保与摄像头输出同步,避免采样错误
数据对齐
支持字节对齐或像素对齐
可根据图像格式自动调整
6. 性能与优化
高吞吐量
DMA + 双缓冲机制实现连续视频采集
CPU 占用低,适合实时应用
可靠性
同步信号异常可触发中断
缓冲区溢出检测
支持帧丢失自动恢复
灵活性
支持多分辨率和多格式切换
可配置裁剪和缩放区域,提高显示效率
7. 应用场景
实时视频显示到 LCD
视频采集与处理算法测试
嵌入式视觉应用,如监控、手势识别、机器人视觉
RA8 系列 GLCDC 模块
1. 简介
**GLCDC(Graphics LCD Controller)**是 RA8 系列 MCU 内置的高性能图形控制器模块,专门用于驱动 TFT/RGB LCD 屏幕,支持各种分辨率、色彩格式和图像处理功能。结合 RT-Thread 的 LCD 驱动框架,可以实现统一接口下的屏幕初始化、刷新、图像绘制及 DMA 加速等功能。
RA8 系列 GLCDC (Graphics LCD Controller) 提供了从 MCU 内部存储器或外部图像缓存向 RGB/LCD 显示屏输出图像的能力。它集成了:
帧缓冲控制:可配置多帧缓冲,实现页面切换或双缓冲显示
颜色格式支持:RGB565, RGB888, ARGB8888 等
图形处理功能:背景图层、文字/图形合成、透明度混合、调色板等
同步信号生成:HSYNC, VSYNC, DE(Data Enable)等
DMA 支持:高速数据传输,减少 CPU 占用
中断功能:帧结束中断、行结束中断等
2. 模块架构
RA8 GLCDC 模块主要包含以下子模块:
图层合成单元(Layer Composition Unit)
支持多图层叠加
提供 alpha blending、透明度控制、颜色键控
可以对图层进行旋转、翻转处理
帧缓冲接口(Frame Buffer Interface)
支持访问 MCU 内部 SRAM 或外部存储器
提供单/双缓冲模式,保证连续显示
配合 DMA 自动读取图像数据
DMA 控制器(DMA Controller)
自动传输像素数据到 RGB 输出端口
可配置突发长度,提高带宽利用率
支持循环传输,适合视频或动画场景
同步信号生成器(Timing Generator)
自动生成 HSYNC/VSYNC/DE 信号
支持 TTL 接口 RGB 时序
可配置极性、同步宽度、前后肩时间等
中断与事件处理单元(Interrupt/Event Controller)
提供帧结束中断、行结束中断
可用于页面切换、动态绘制或滚动显示
支持 DMA 传输完成触发中断
3. GLCDC 工作原理
帧缓冲读取
GLCDC 通过 DMA 从内存读取图像数据,支持单/双缓冲模式,保证连续显示。
图层合成
支持多图层叠加,例如背景图层 + 前景图层 + 图标/文字图层
提供透明度控制和调色板映射
像素时序输出
根据 LCD 的接口要求生成 HSYNC/VSYNC/DE 信号
支持 RGB 并行接口、TTL 接口或 LVDS(视具体板级实现)
中断与事件
帧结束中断(VBlank):可用于更新下一帧数据
行结束中断:可用于滚动显示或动态绘制
4. GLCDC 支持的功能与特性
功能类别 |
描述 |
|---|---|
分辨率 |
最高可达 1280x800 |
色彩模式 |
RGB565、RGB888、ARGB8888 等 |
多图层 |
背景 + 前景 + 符号图层,可叠加混合 |
帧缓冲 |
支持单帧/双帧缓冲模式,DMA 传输提高性能 |
调色板 |
支持 8/16 位调色板映射,实现色彩转换 |
同步信号 |
HSYNC, VSYNC, DE,可配置极性和时序 |
DMA 支持 |
自动从内存传输图像数据,无需 CPU 干预 |
中断 |
帧结束、行结束中断,可用于屏幕刷新同步 |
旋转/翻转 |
支持 90°/180°/270°旋转及 X/Y 翻转 |
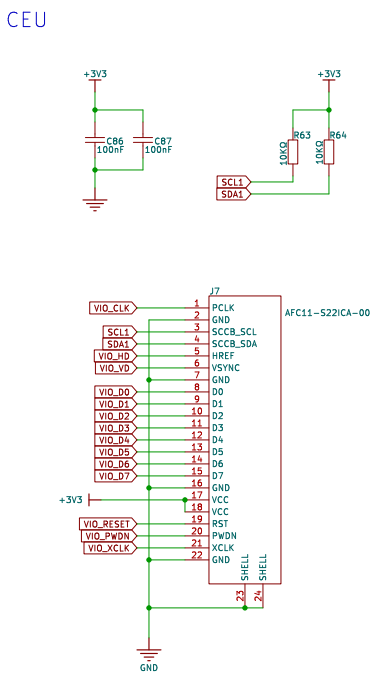
硬件说明
CEU 摄像头接口如下图所示:
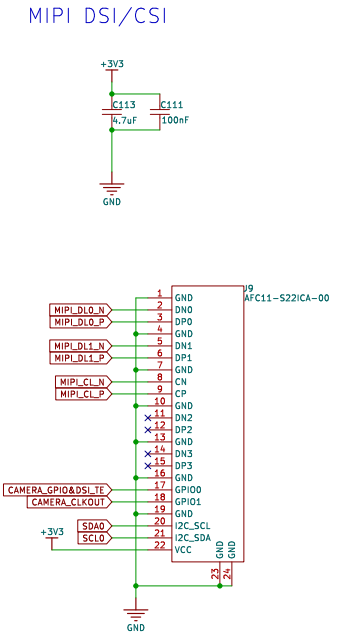
MIPI DSI 接口如下图所示:
CEU摄像头连线方式如下图:
使用 22Pin 异向排线连接开发板的 CEU_CAM 排线座与摄像头转接板的 DVP 排线座。
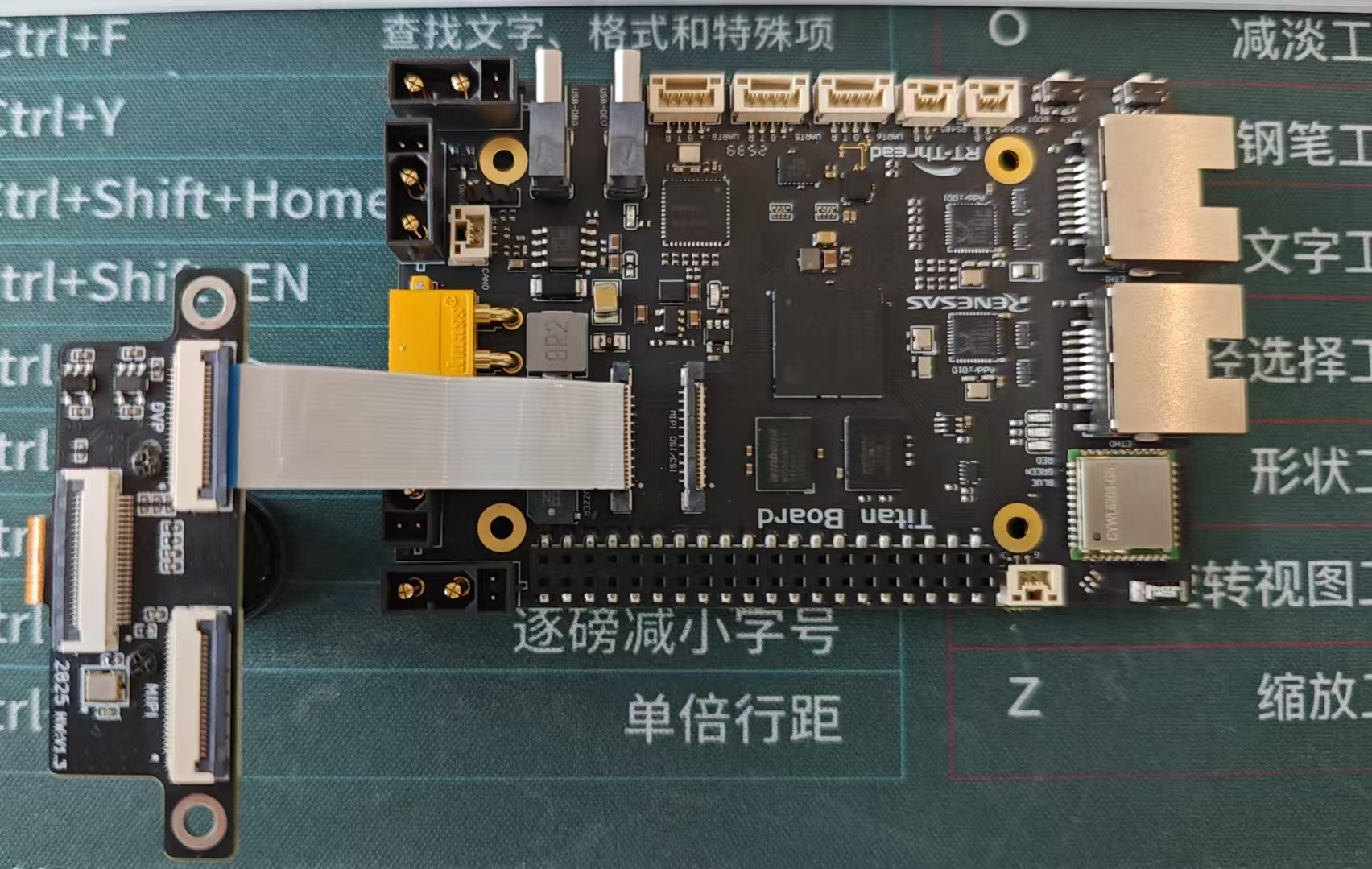
MIPI LCD连接方式如下图:
屏幕型号:冠显 TL043WVV02CT
使用 22Pin 异向排线连接开发板的 MIPI DSI/CSI 排线座与屏幕转接板的 DIS-MIPI 排线座,MIPI 屏幕连接转接板的 TITAN-MIPI 排线座。

FSP 配置
HyperRAM 配置
新建 r_ospi_b stack:
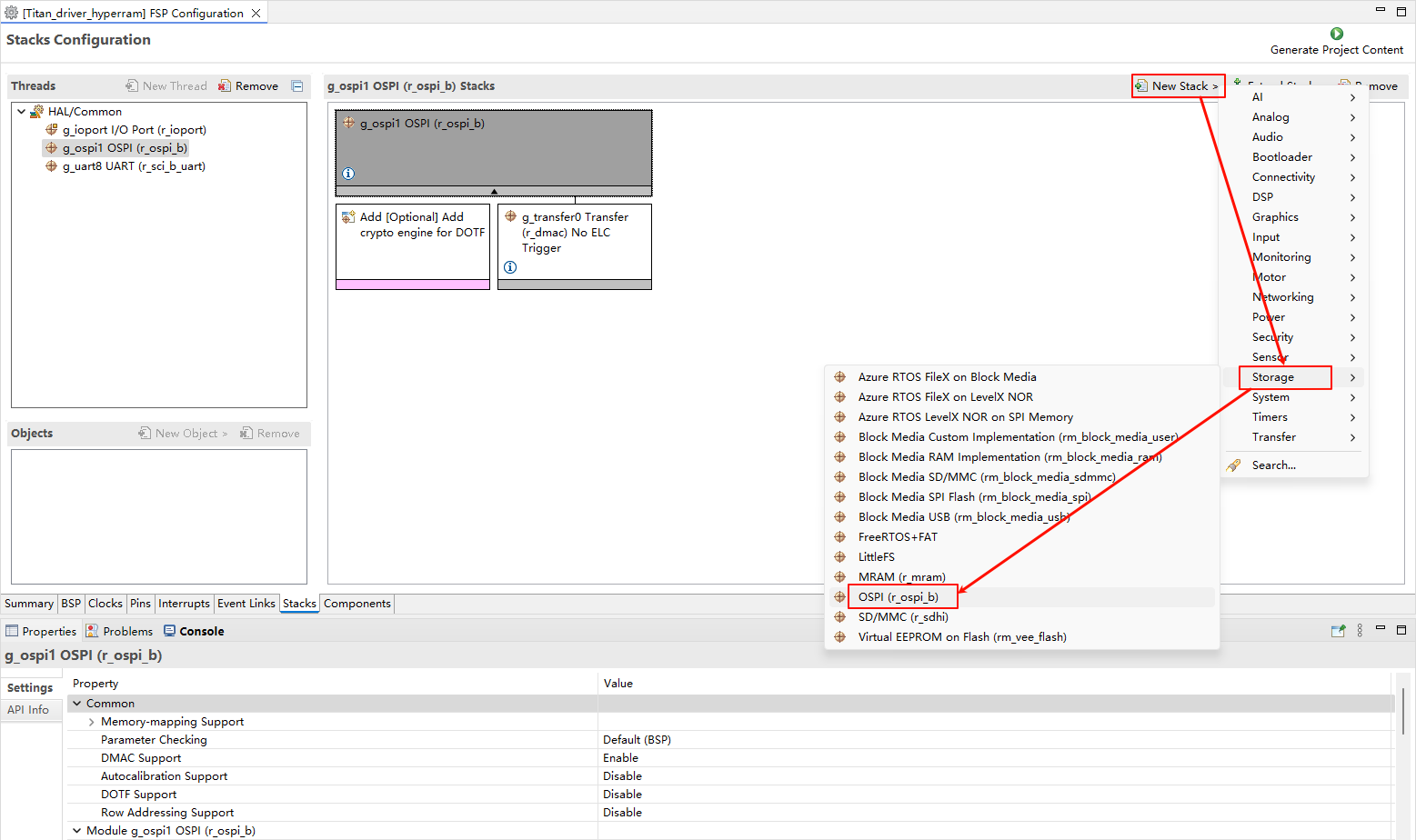
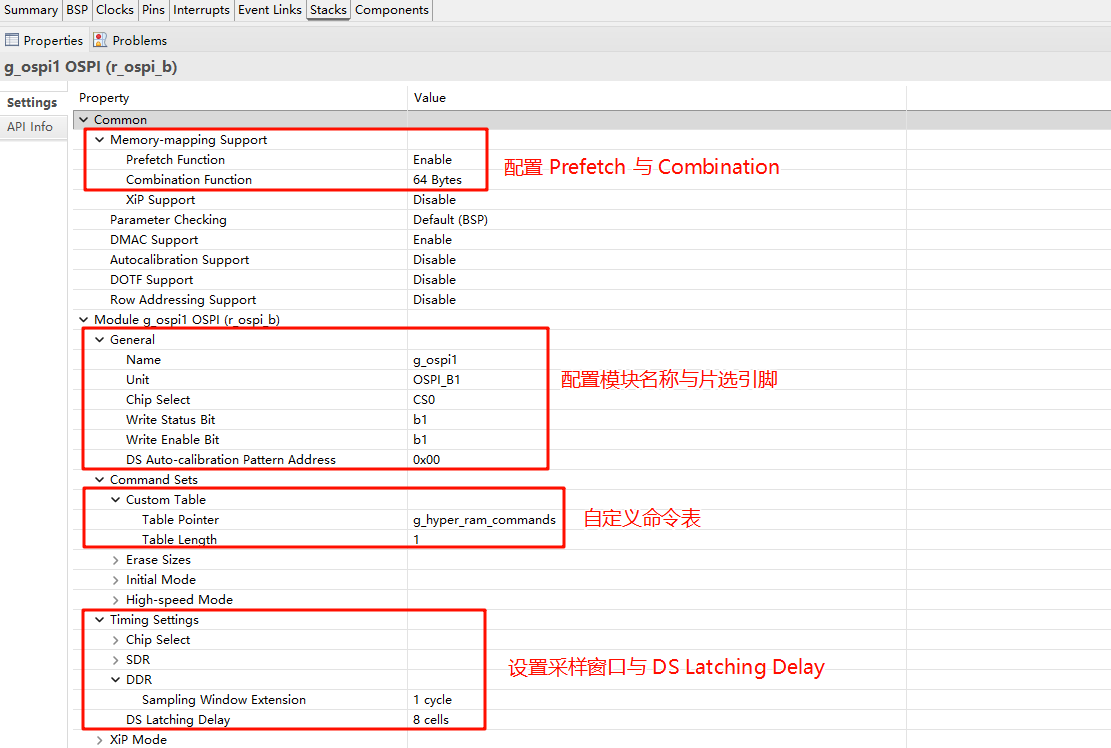
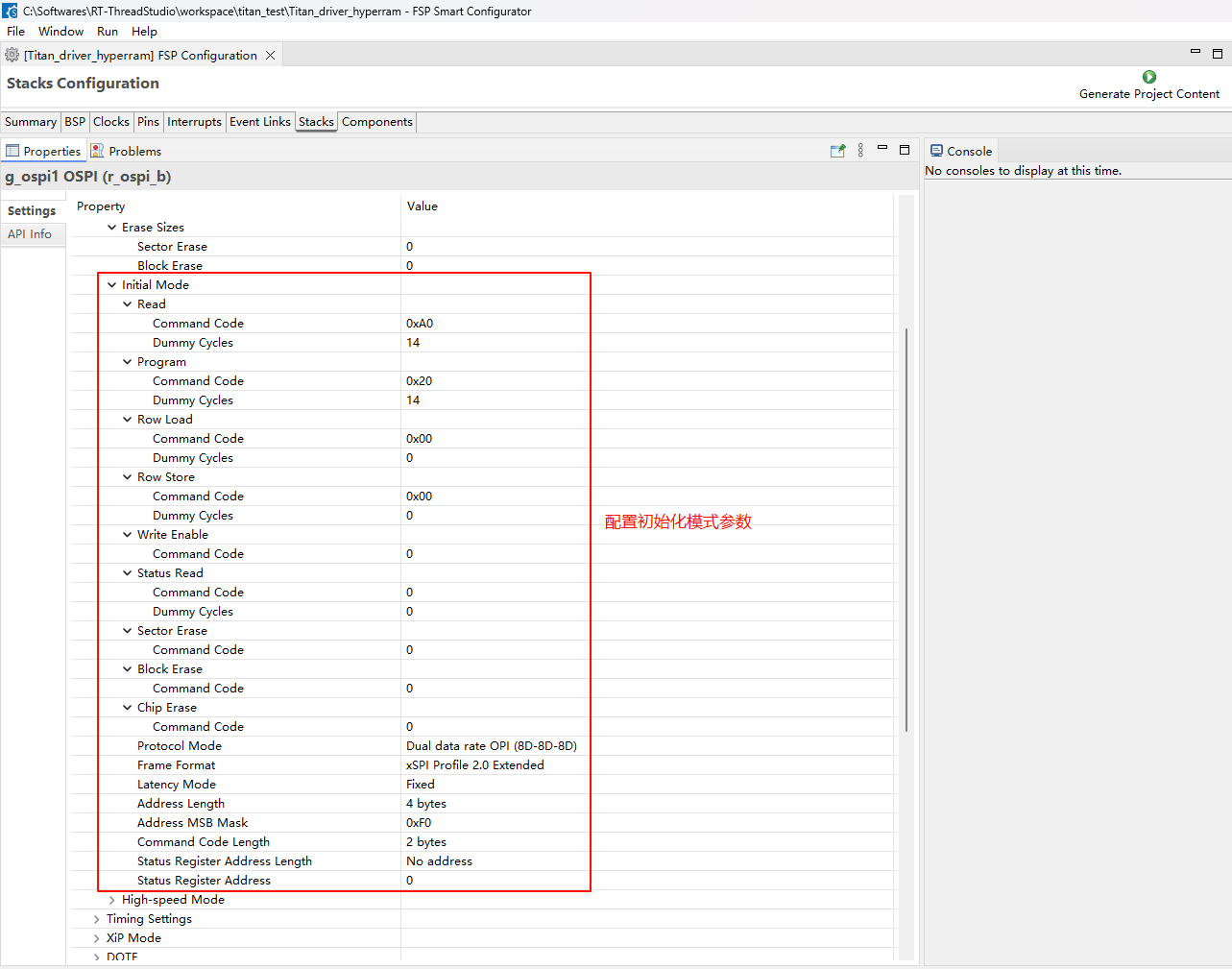
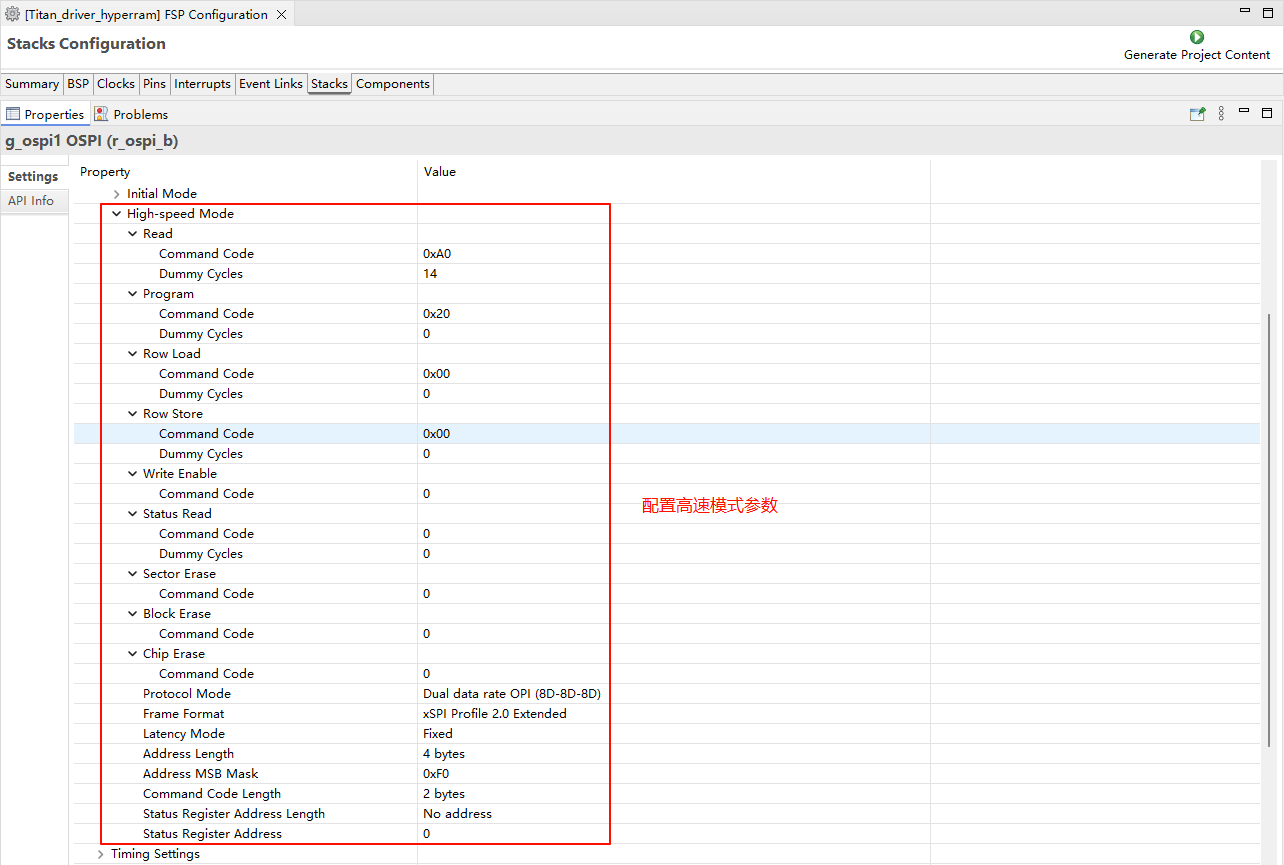
配置 r_ospi_b stack:
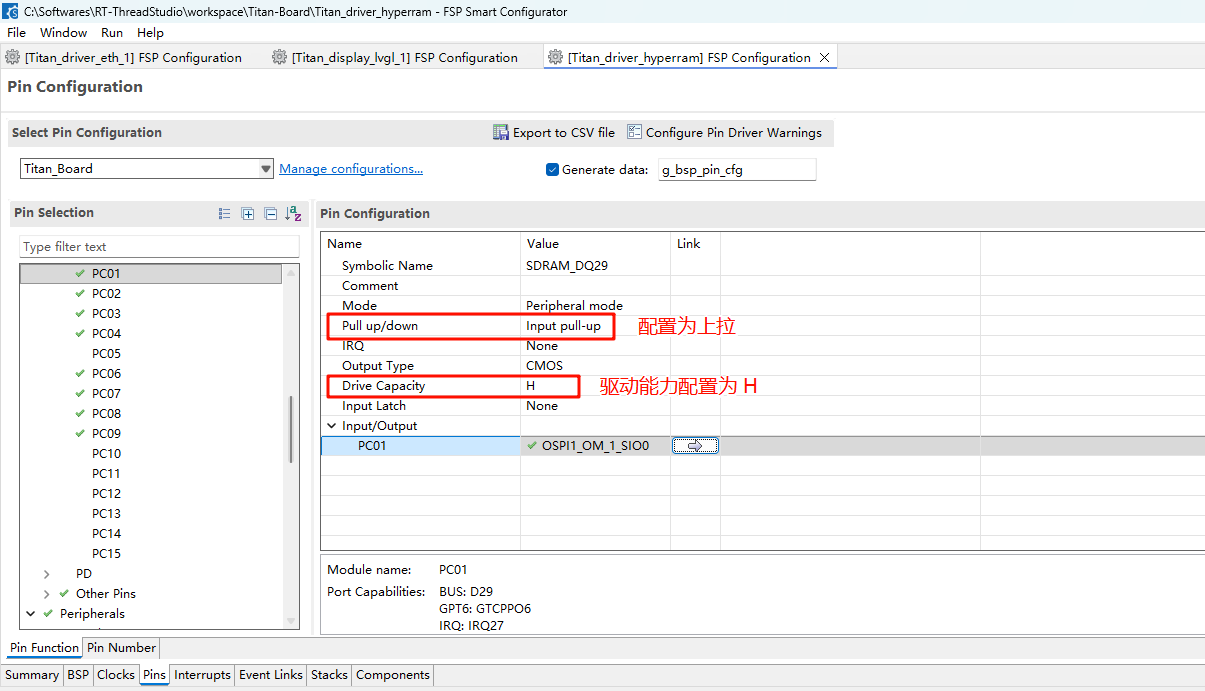
HyperRAM 引脚配置:
HyperRAM 所有相关引脚的驱动能力配置为 H,OM_1_SIO0~OM_1_SIO7 需要配置为输入上拉。
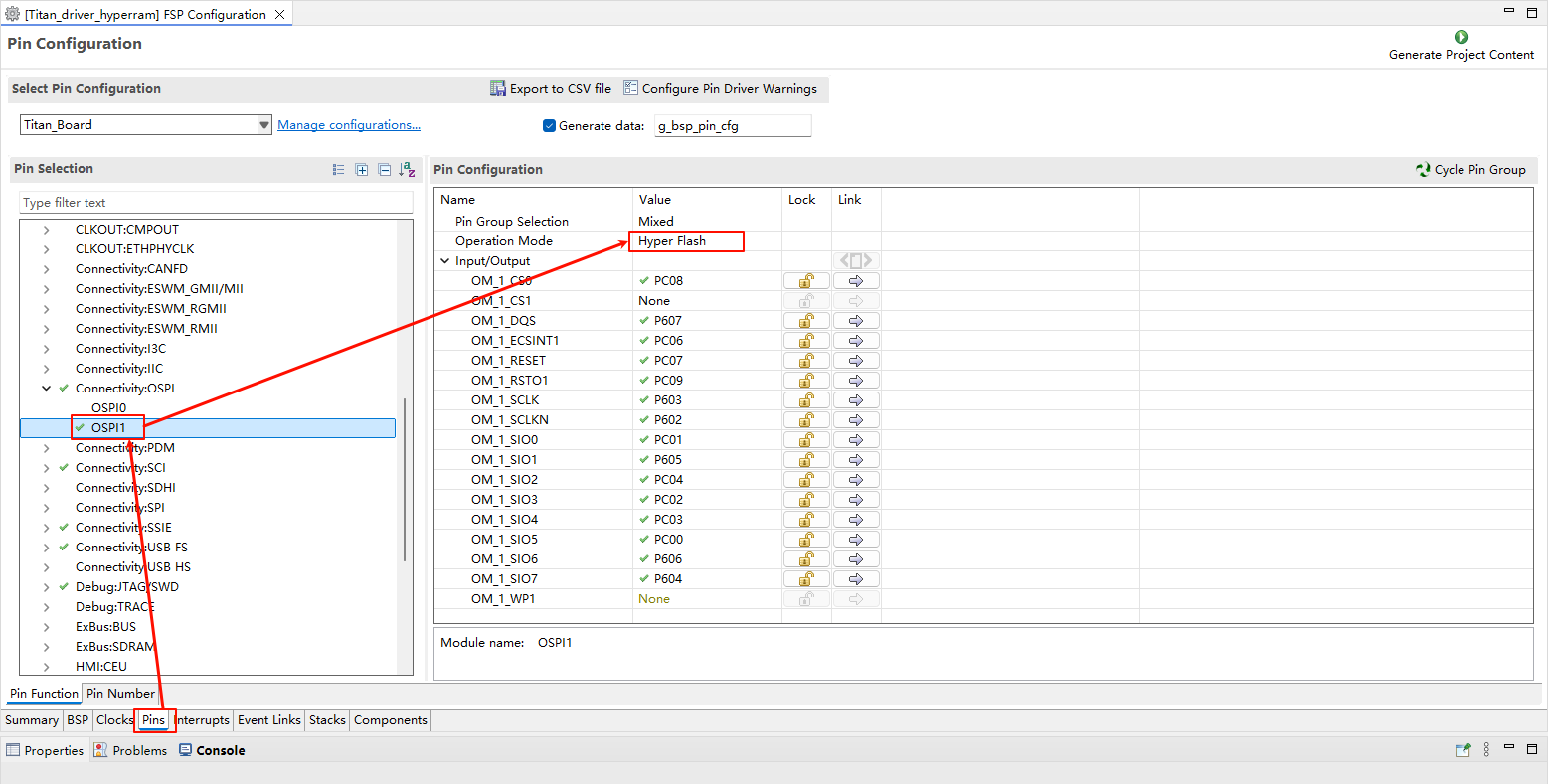
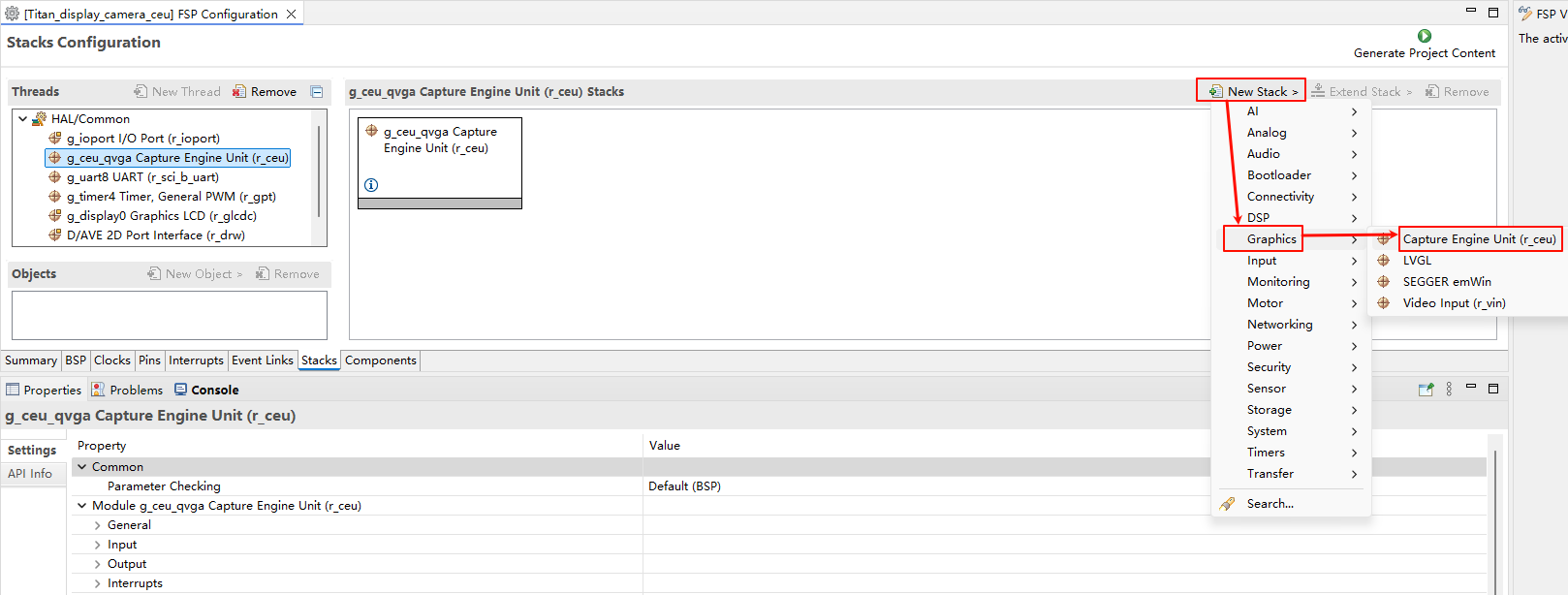
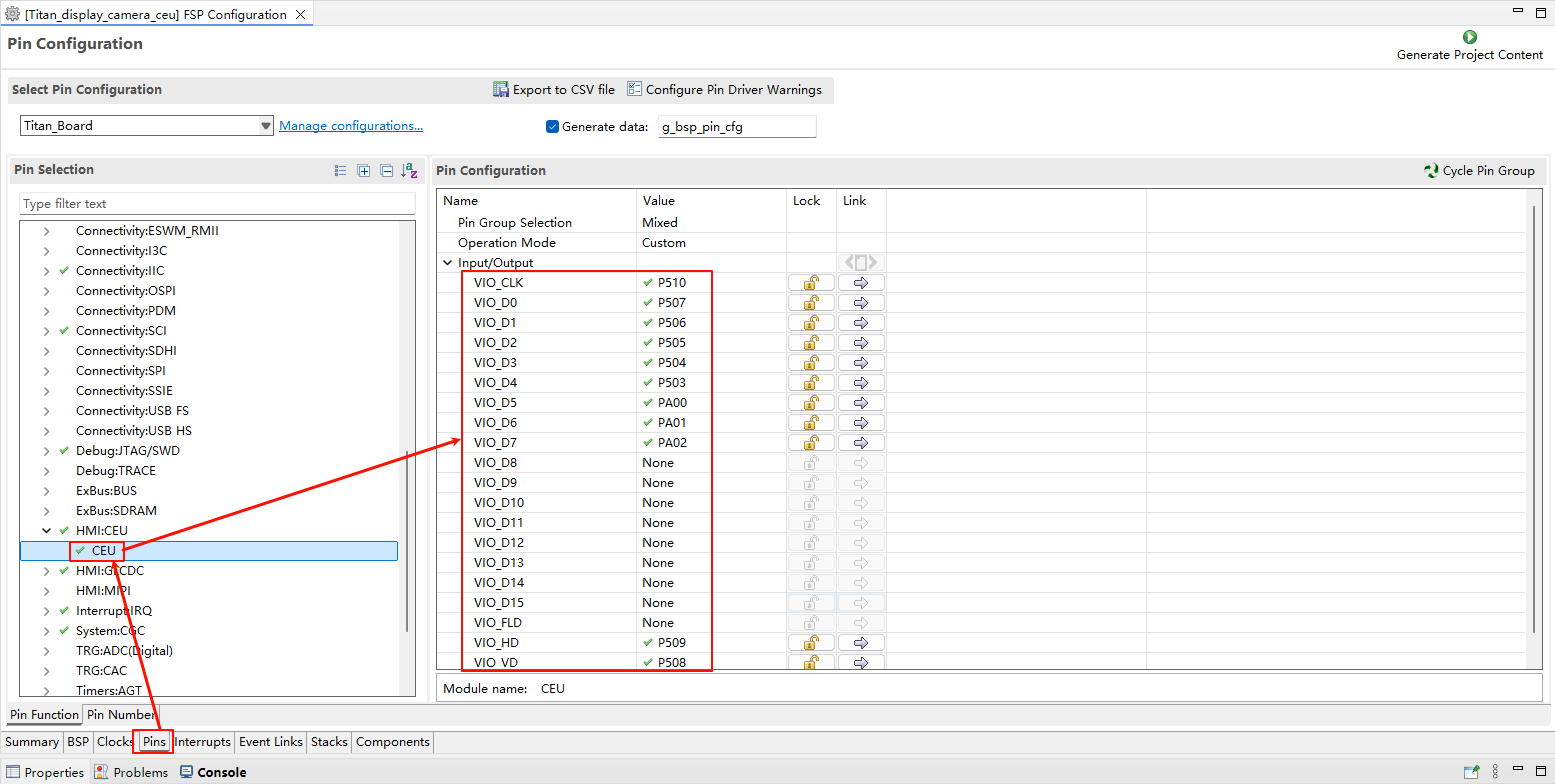
CEU 配置
新建
r_ceustack:
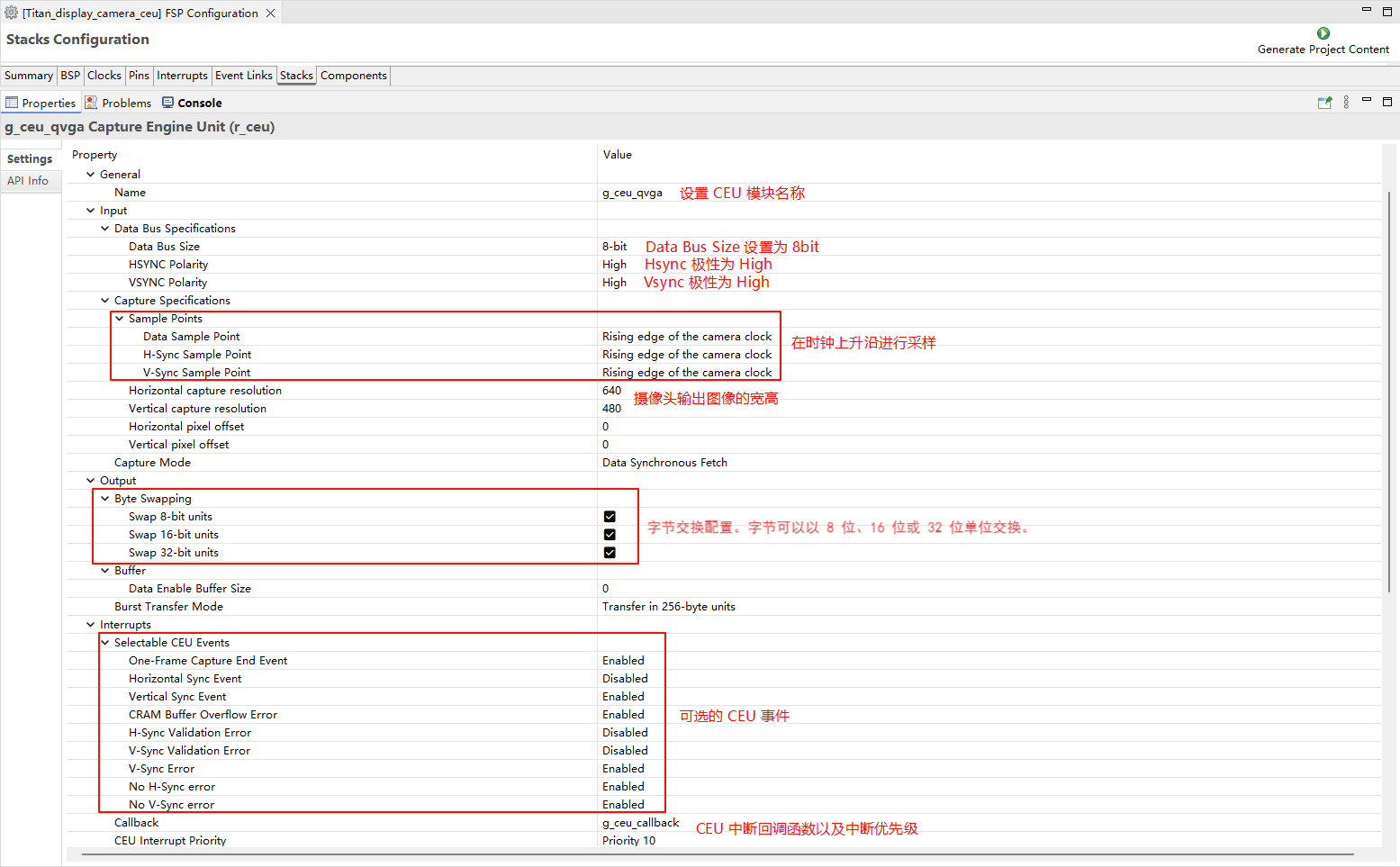
配置 CEU:
配置 CEU 引脚:
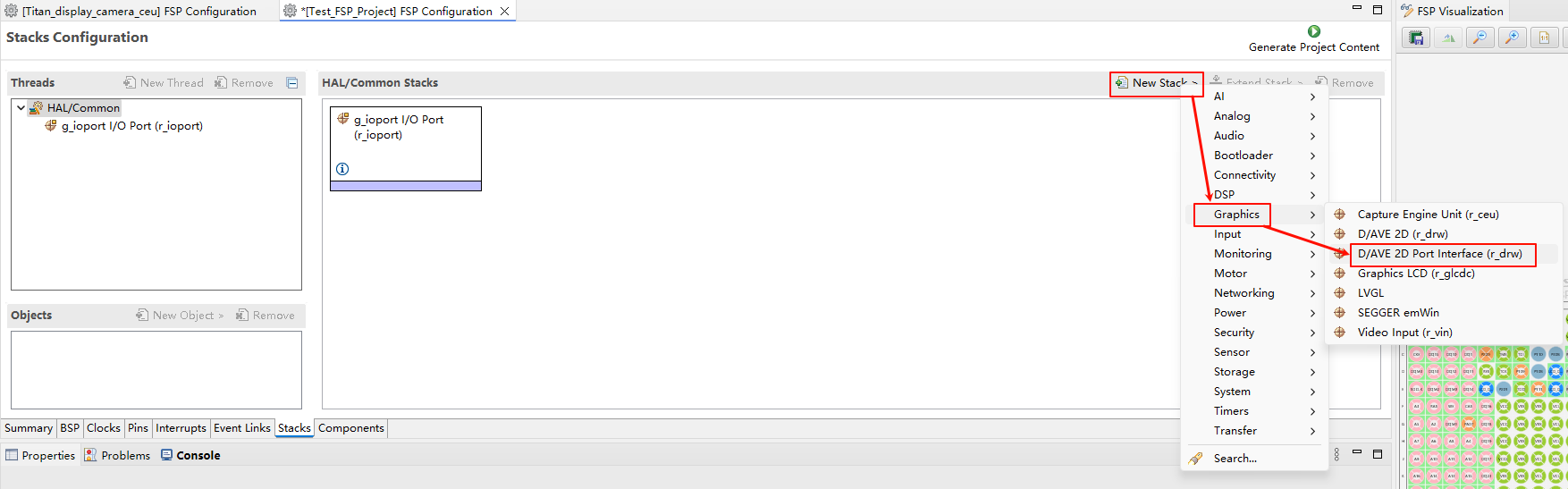
D/AVE 2D 配置
新建
r_drwstack:
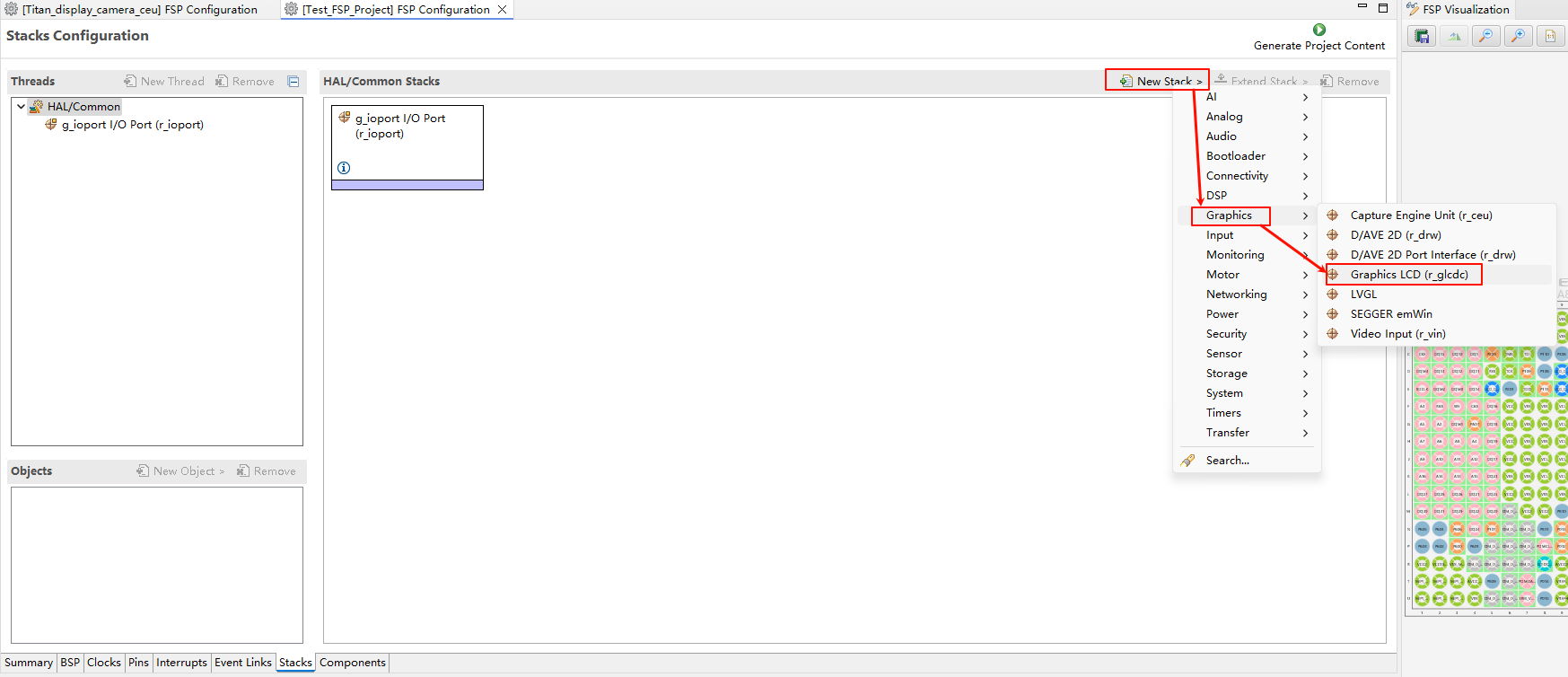
GLCDC 配置
新建
r_glcdcstack:
配置中断回调和图形层1:
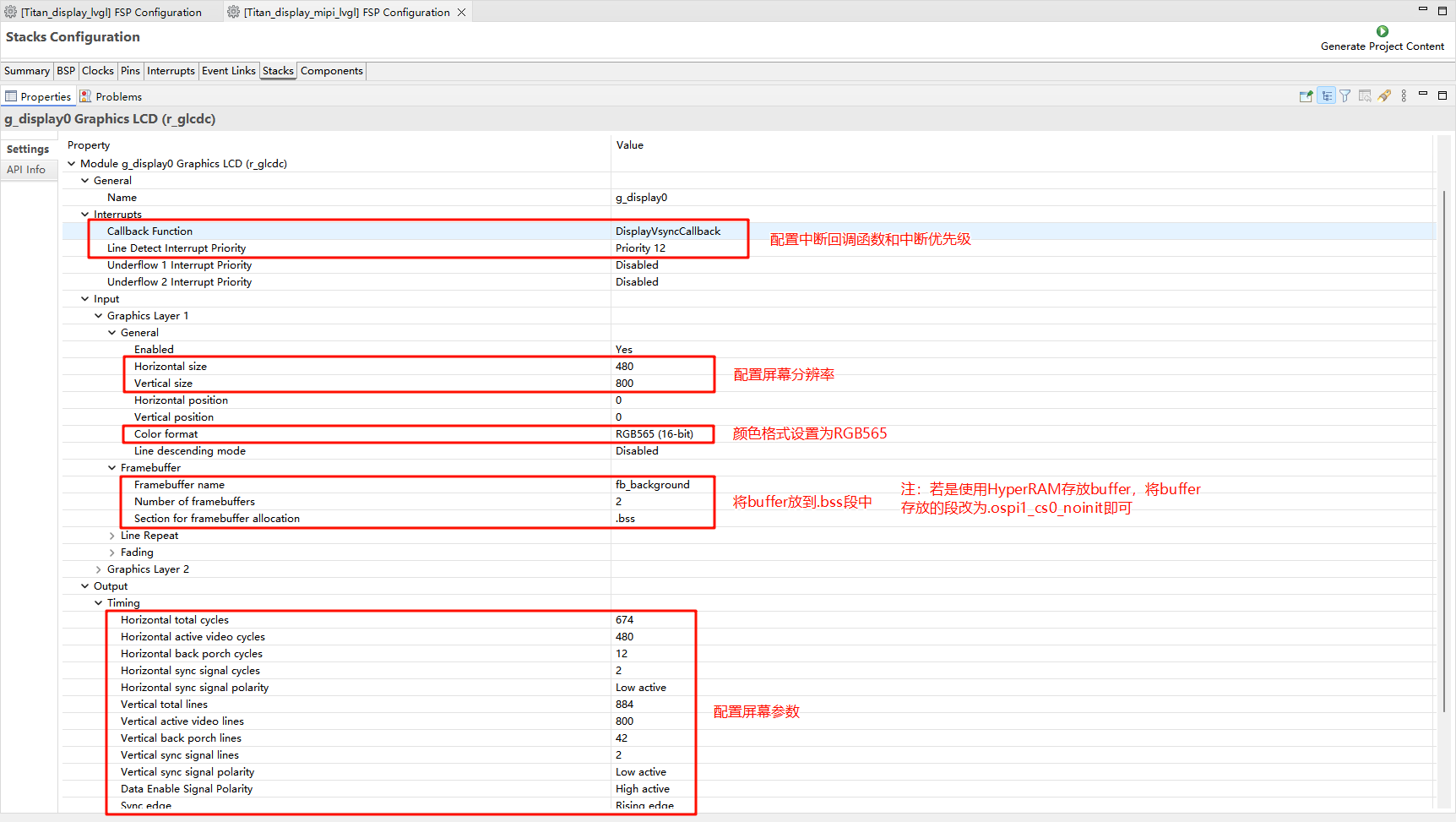
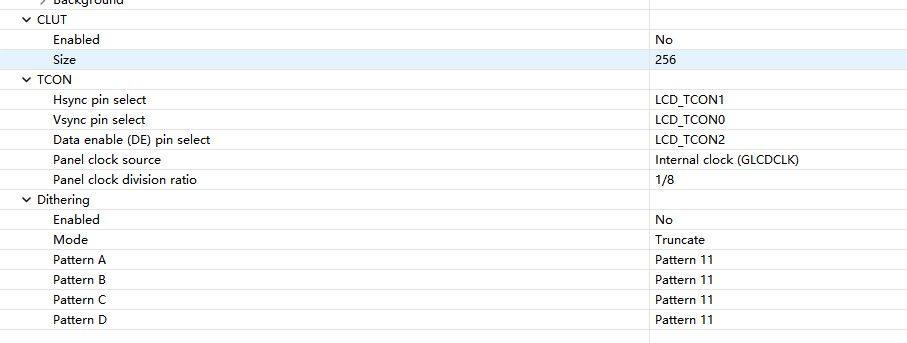
配置输出参数、CLUT、TCON和抖动。
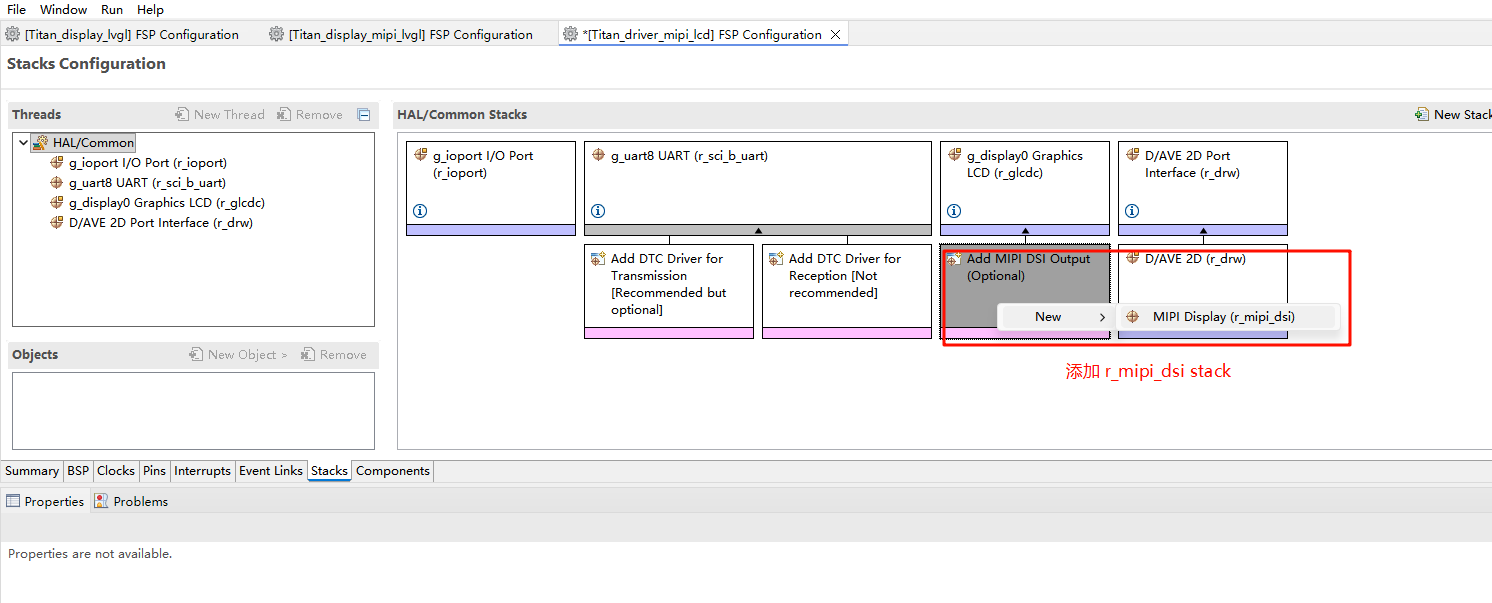
MIPI DSI 配置
添加 r_mipi_dsi stack。
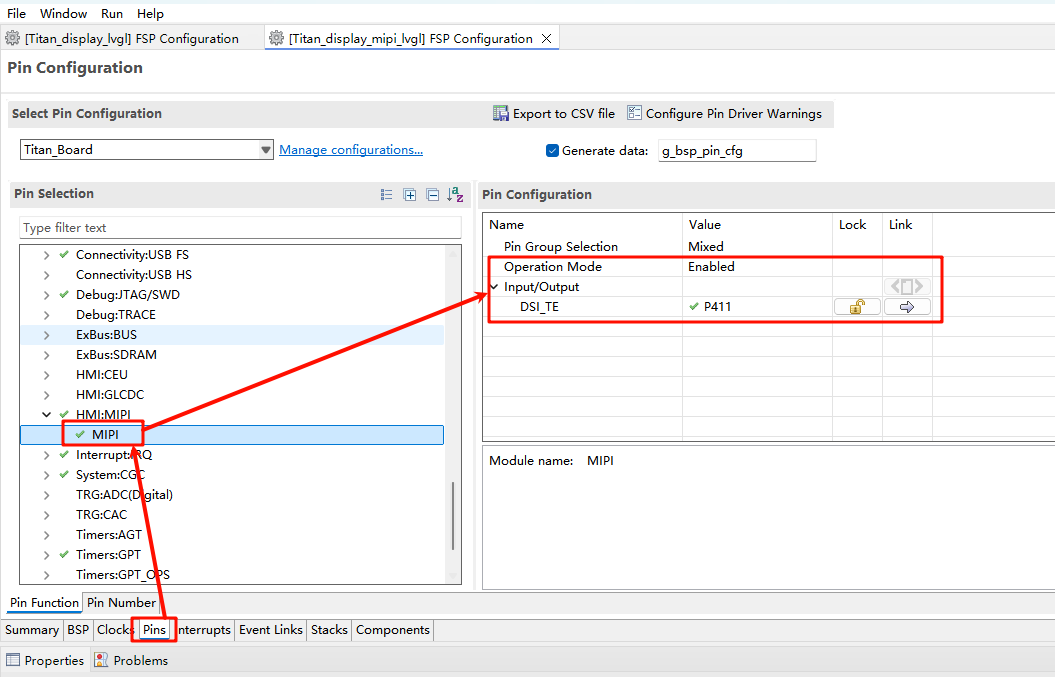
配置 MIPI DSI_TE 引脚。
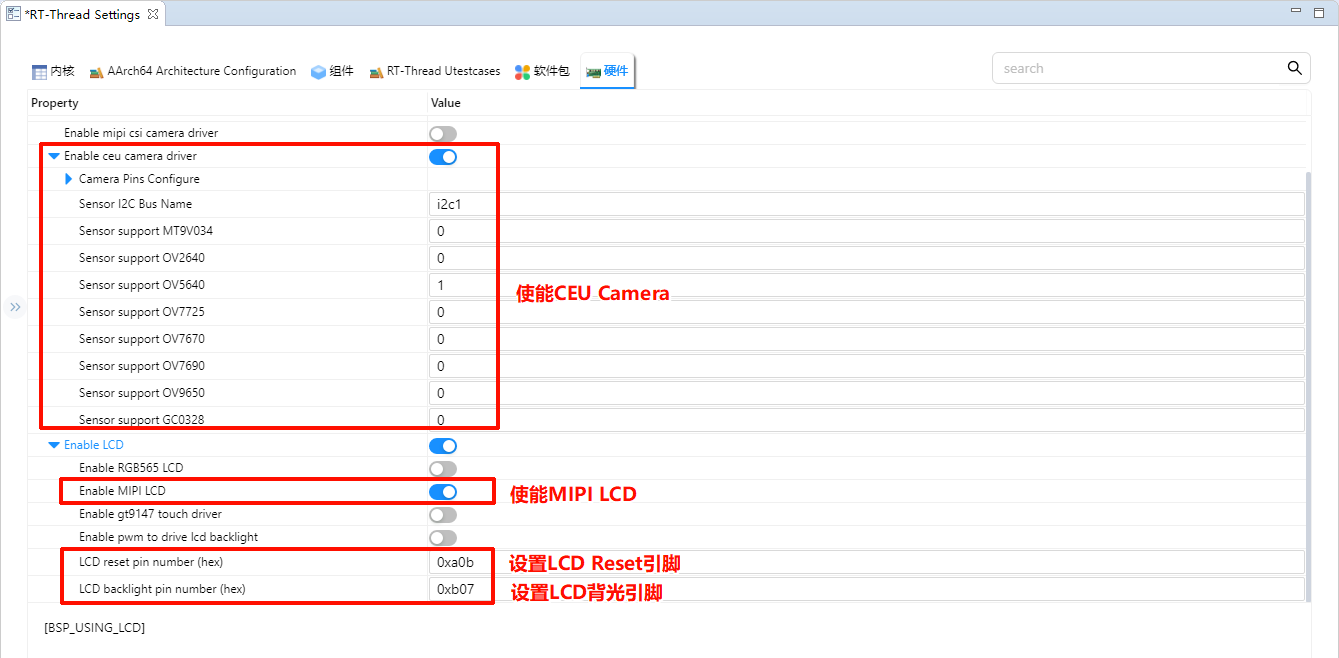
RT-Thread Settings 配置
使能 CUE 摄像头,使用 i2c1 和 ov5640 摄像头;使能 MIPI LCD,设置Reset和背光引脚。
编译&下载
RT-Thread Studio:在RT-Thread Studio 的包管理器中下载 Titan Board 资源包,然后创建新工程,执行编译。
编译完成后,将开发板的 USB-DBG 接口与PC 机连接,然后将固件下载至开发板。
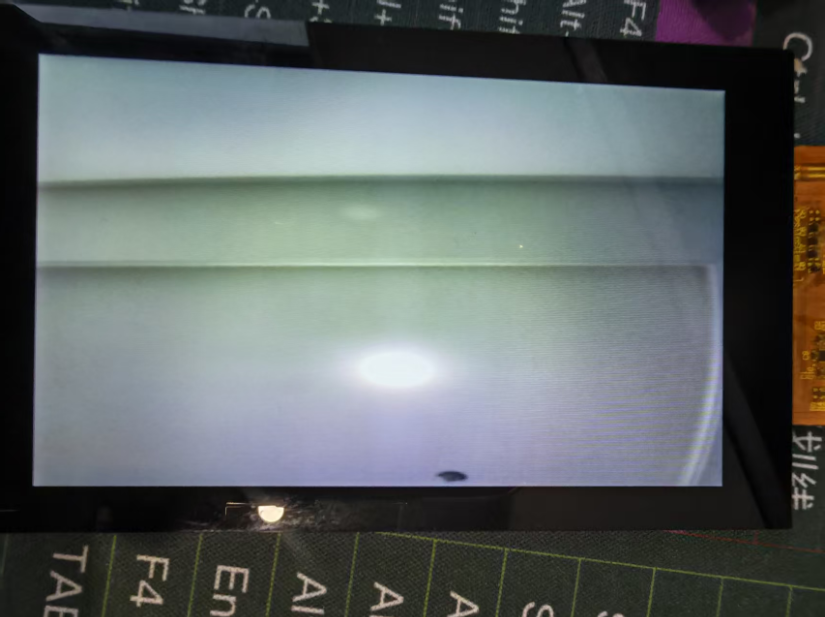
运行效果
复位 Titan Board 后终端会输出如下信息:
下面是 LCD 屏幕上显示的图像: