SCI_SPI 驱动例程
中文 | English
简介
本例程主要介绍了如何在EtherKit上使用RT-Thread的SCI_SPI框架;
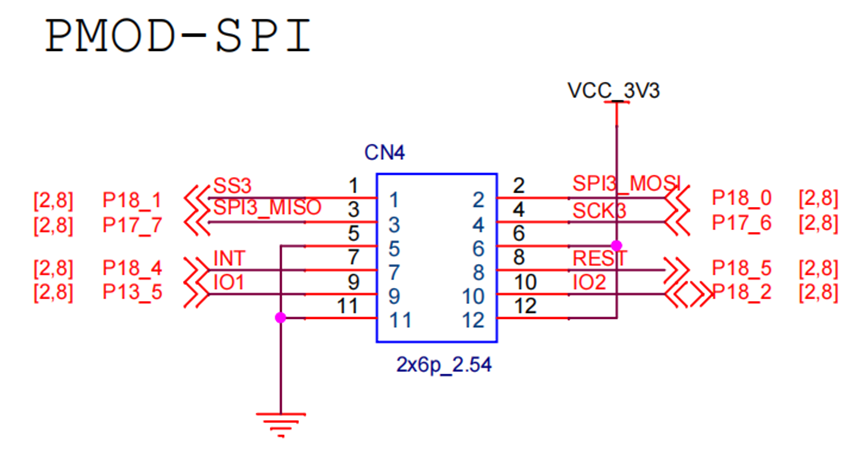
硬件说明
EtherKit 板载资源有PMOD接口,连接到R9A07G084M08GBG 芯片的SCI_SPI3;
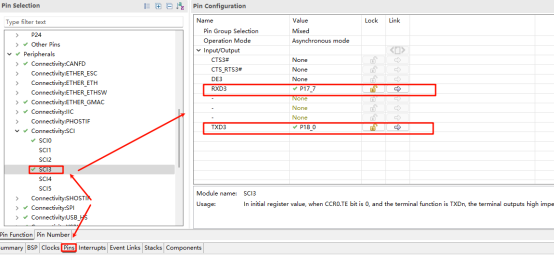
FSP配置说明
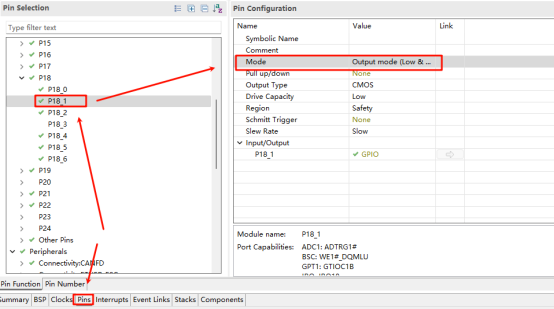
打开FSP工具,新建 Stacks 并选择 r_sci_spi3:
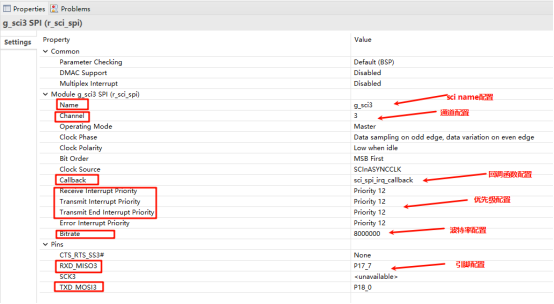
Sci的片选引脚选择常低
RT-Thread Settings配置
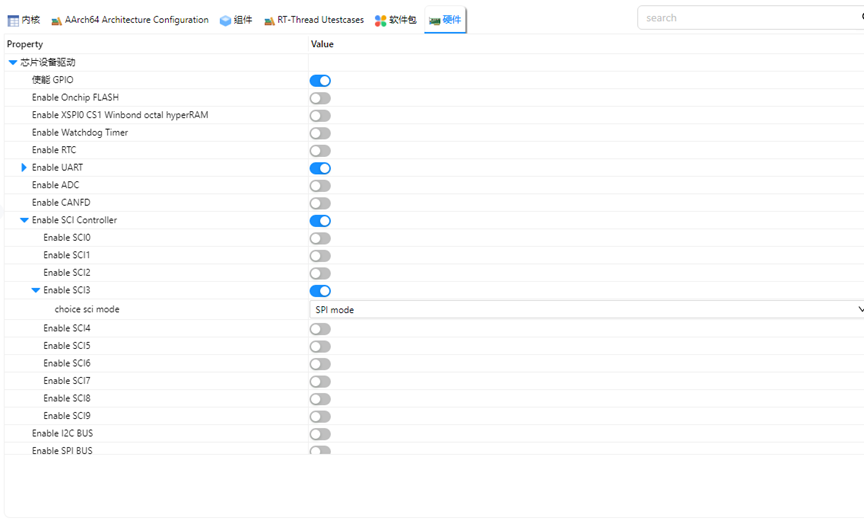
打开RT-Thread Settings,硬件选择SCI,并配置SCI3模式为SPI:
示例工程介绍
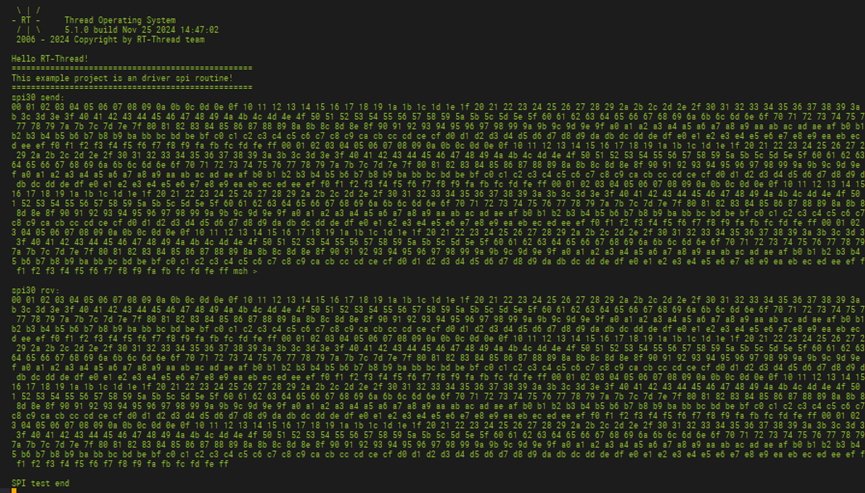
基于RT-Thread的SCI驱动框架实现对PMODE的loop回环测试(将PMOD的SPI3_MOSI 连接到SPI3_MISO),代码如下:
void spi_loop_test(void)
{
#define TEXT_NUMBER_SIZE 1024
#define SPI_BUS_NAME "sci3s"
#define SPI_NAME "spi30"
static uint8_t sendbuf[TEXT_NUMBER_SIZE] = {0};
static uint8_t readbuf[TEXT_NUMBER_SIZE] = {0};
for (int i = 0; i < sizeof(readbuf); i++)
{
sendbuf[i] = i;
}
static struct rt_spi_device *spi_dev = RT_NULL;
struct rt_spi_configuration cfg;
rt_hw_sci_spi_device_attach(SPI_BUS_NAME, SPI_NAME, NULL);
cfg.data_width = 8;
cfg.mode = RT_SPI_MASTER | RT_SPI_MODE_0 | RT_SPI_MSB | RT_SPI_NO_CS;
cfg.max_hz = 1 * 1000 * 1000;
spi_dev = (struct rt_spi_device *)rt_device_find(SPI_NAME);
if (RT_NULL == spi_dev)
{
rt_kprintf("spi sample run failed! can't find %s device!\n", SPI_NAME);
return;
}
rt_spi_configure(spi_dev, &cfg);
rt_kprintf("%s send:\n", SPI_NAME);
for (int i = 0; i < sizeof(sendbuf); i++)
{
rt_kprintf("%02x ", sendbuf[i]);
}
rt_spi_transfer(spi_dev, sendbuf, readbuf, sizeof(sendbuf));
rt_kprintf("\n\n%s rcv:\n", SPI_NAME);
for (int i = 0; i < sizeof(readbuf); i++)
{
if (readbuf[i] != sendbuf[i])
{
rt_kprintf("SPI test fail!!!\n");
break;
}
else
rt_kprintf("%02x ", readbuf[i]);
}
rt_kprintf("\n\n");
rt_kprintf("SPI test end\n");
}
编译&下载
RT-Thread Studio:在RT-Thread Studio 的包管理器中下载EtherKit 资源包,然后创建新工程,执行编译。
IAR:首先双击mklinks.bat,生成rt-thread与libraries 文件夹链接;再使用Env 生成IAR工程;最后双击project.eww打开IAR工程,执行编译。
编译完成后,将开发板的Jlink接口与PC 机连接,然后将固件下载至开发板。
运行效果
打开串口工具,可以看到通过spi回环测试中发送的数据与接收数据一致: