GPT 驱动例程
中文 | English
简介
在我们具体的应用场合中往往都离不开timer的使用,本例程主要介绍了如何在EtherKit上使用GPT设备,包括基本定时器的使用和PWM的使用。
FSP配置说明
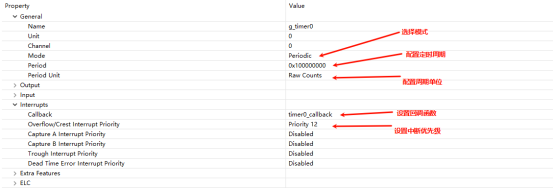
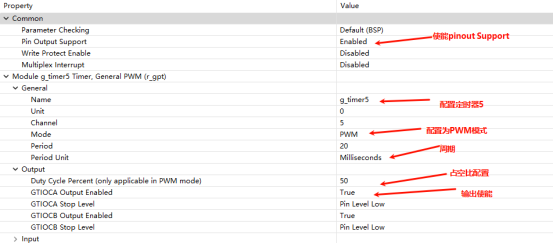
FSP 分别配置使能GPT0为基本定时器模式,GPT5为PWM 模式:
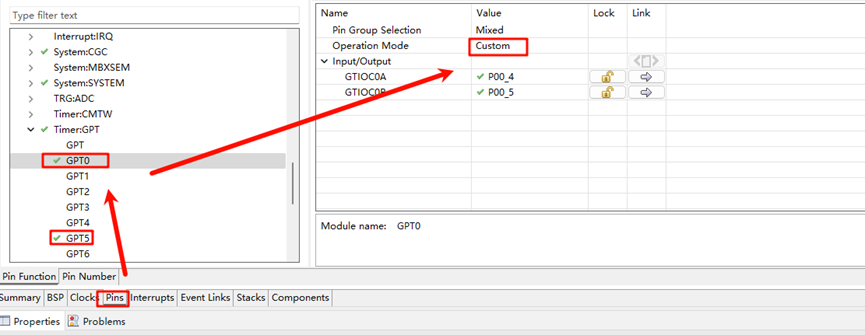
并配置pins 使能GPT0 GPT5:
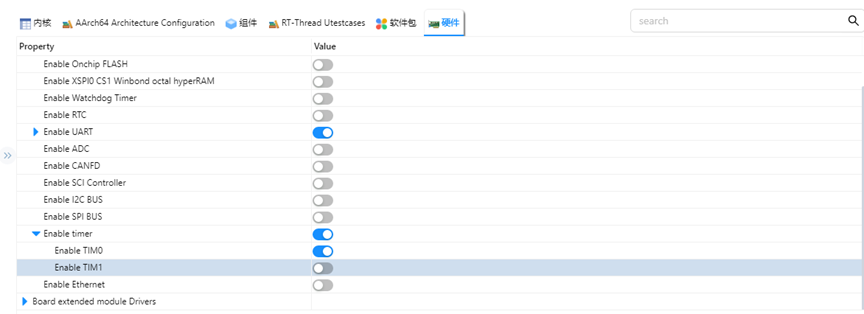
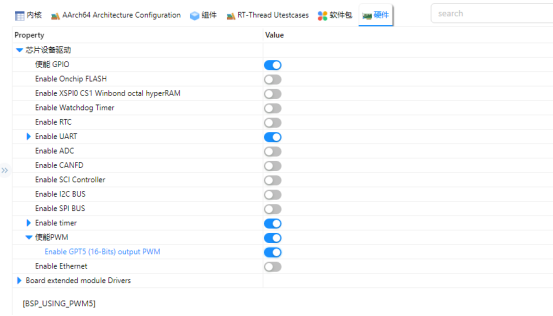
RT-Thread Settings配置
在配置中打开timer0使能与PWM使能:
示例工程说明
本例程的源码位于/projects/etherkit_driver_gpt:
int hwtimer_sample(void)
{
rt_err_t ret = RT_EOK;
rt_hwtimerval_t timeout_s;
rt_device_t hw_dev = RT_NULL;
rt_hwtimer_mode_t mode;
rt_uint32_t freq = 400000000; /* 1Mhz */
hw_dev = rt_device_find(HWTIMER_DEV_NAME);
if (hw_dev == RT_NULL)
{
rt_kprintf("hwtimer sample run failed! can't find %s device!\n", HWTIMER_DEV_NAME);
return -RT_ERROR;
}
ret = rt_device_open(hw_dev, RT_DEVICE_OFLAG_RDWR);
if (ret != RT_EOK)
{
rt_kprintf("open %s device failed!\n", HWTIMER_DEV_NAME);
return ret;
}
rt_device_set_rx_indicate(hw_dev, timeout_cb);
rt_device_control(hw_dev, HWTIMER_CTRL_FREQ_SET, &freq);
mode = HWTIMER_MODE_PERIOD;
ret = rt_device_control(hw_dev, HWTIMER_CTRL_MODE_SET, &mode);
if (ret != RT_EOK)
{
rt_kprintf("set mode failed! ret is :%d\n", ret);
return ret;
}
/* Example Set the timeout period of the timer */
timeout_s.sec = 1; /* secend */
timeout_s.usec = 0; /* microsecend */
if (rt_device_write(hw_dev, 0, &timeout_s, sizeof(timeout_s)) != sizeof(timeout_s))
{
rt_kprintf("set timeout value failed\n");
return -RT_ERROR;
}
/* read hwtimer value */
rt_device_read(hw_dev, 0, &timeout_s, sizeof(timeout_s));
rt_kprintf("Read: Sec = %d, Usec = %d\n", timeout_s.sec, timeout_s.usec);
return ret;
}
MSH_CMD_EXPORT(hwtimer_sample, hwtimer sample);
每隔1s 中触发一次中断回调函数打印输出,下面是PWM 配置使能:
PWM相关宏定义:
当前版本的 PWM 驱动将每个通道都看做一个单独的 PWM 设备,每个设备都只有一个通道0。使用PWM5设备,注意此处通道选择为0通道;
#define PWM_DEV_NAME "pwm5" /* PWM设备名称 */
#define PWM_DEV_CHANNEL 0 /* PWM通道 */
struct rt_device_pwm *pwm_dev; /* PWM设备句柄 */
配置PWM周期以及占空比:
static int pwm_sample(int argc, char *argv[])
{
rt_uint32_t period, pulse, dir;
period = 500000; /* 周期为0.5ms,单位为纳秒ns */
dir = 1; /* PWM脉冲宽度值的增减方向 */
pulse = 100000; /* PWM脉冲宽度值,单位为纳秒ns */
/* 查找设备 */
pwm_dev = (struct rt_device_pwm *)rt_device_find(PWM_DEV_NAME);
if (pwm_dev == RT_NULL)
{
rt_kprintf("pwm sample run failed! can't find %s device!\n", PWM_DEV_NAME);
return RT_ERROR;
}
/* 设置PWM周期和脉冲宽度默认值 */
rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL, period, pulse);
/* 使能设备 */
rt_pwm_enable(pwm_dev, PWM_DEV_CHANNEL);
}
/* 导出到 msh 命令列表中 */
MSH_CMD_EXPORT(pwm_sample, pwm sample);
编译&下载
RT-Thread Studio:在RT-Thread Studio 的包管理器中下载EtherKit 资源包,然后创建新工程,执行编译。
IAR:首先双击mklinks.bat,生成rt-thread与libraries 文件夹链接;再使用Env 生成IAR工程;最后双击project.eww打开IAR工程,执行编译。
编译完成后,将开发板的Jlink接口与PC 机连接,然后将固件下载至开发板。
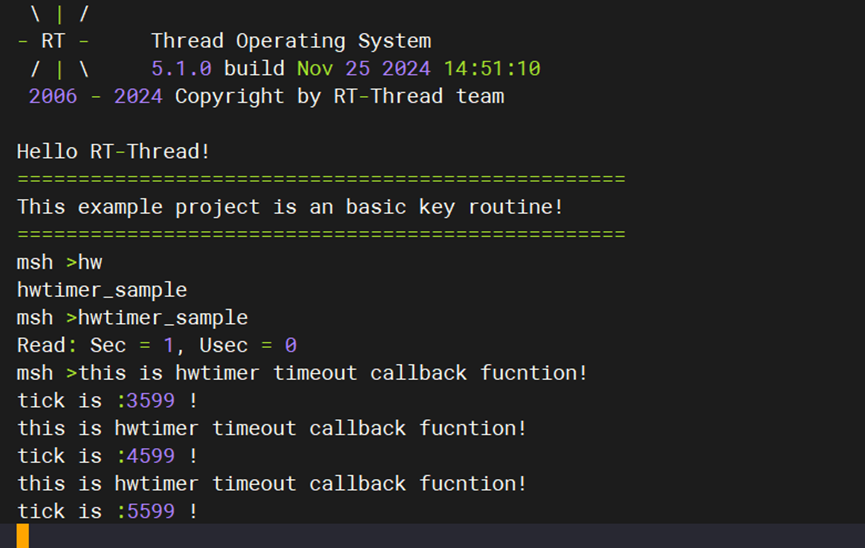
运行效果
在串口终端分别输入pwm_sample、hwtimer_sample查看具体效果;
每隔1s触发回调函数并打印输出:
使用逻辑分析仪量取Pwm 输出波形如下所示:
