CANFD 驱动例程
中文 | English
简介
本例程主要介绍了如何在EtherKit上使用canfd设备;
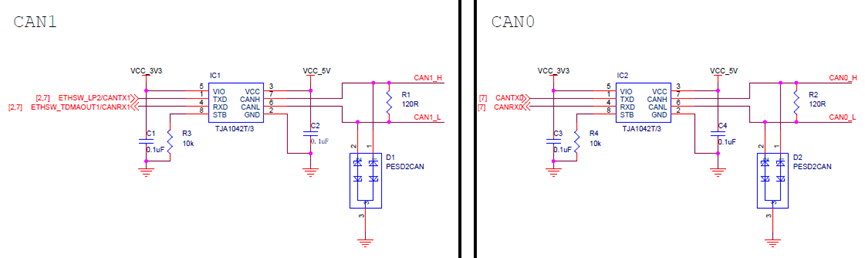
硬件说明
软件说明
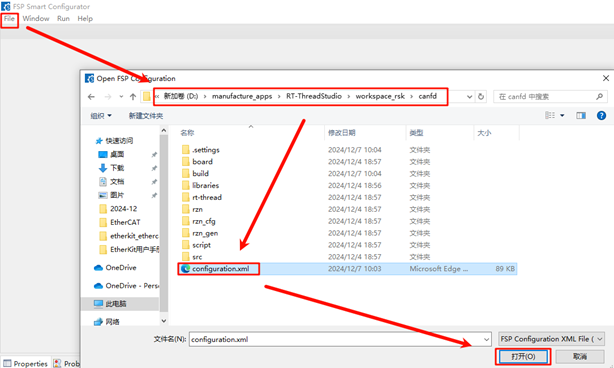
FSP配置说明
选择新建工程下的configuration.xml文件,在rzn-fsp中打开;
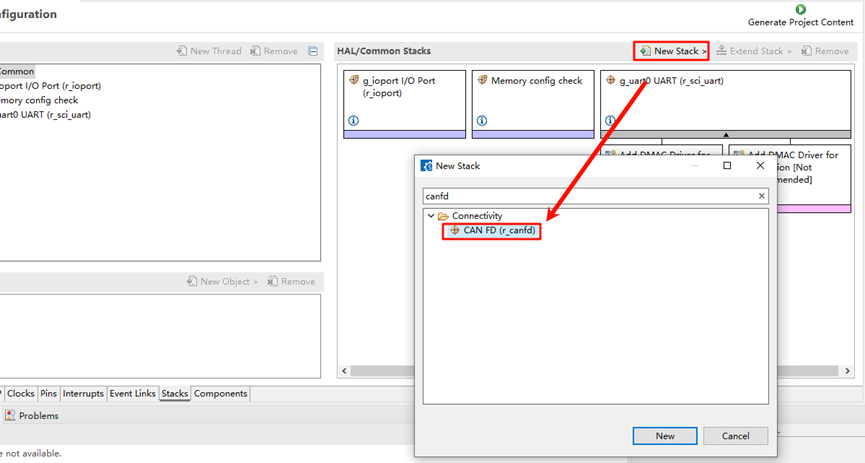
点击添加New Stack,搜索canfd并添加r_canfd,这里我们需要添加两个canfd_stack;
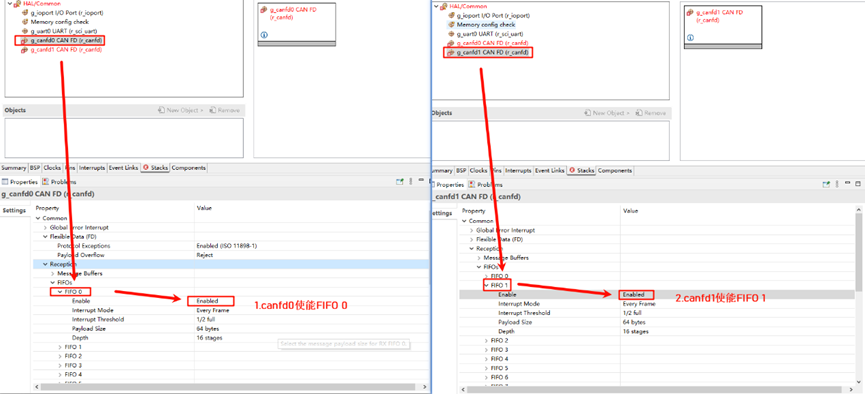
在基本配置中我们为canfd0和canfd1分别使能接收FIFO中断,依次选择Common->Reception->FIFOs->FIFO 0 / FIFO 1->Enable,其中为canfd0使能FIFO 0中断,canfd1使能FIFO 1中断:
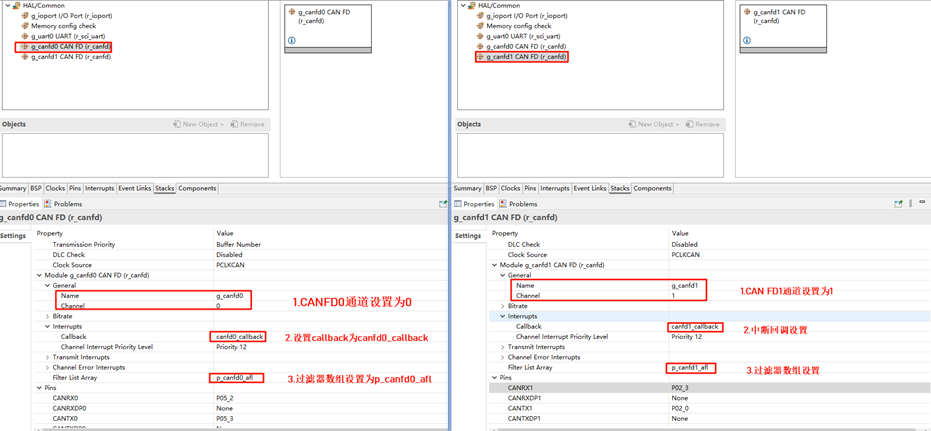
接下来我们需要为CANFD分别设置通道、中断回调函数及过滤器数组;
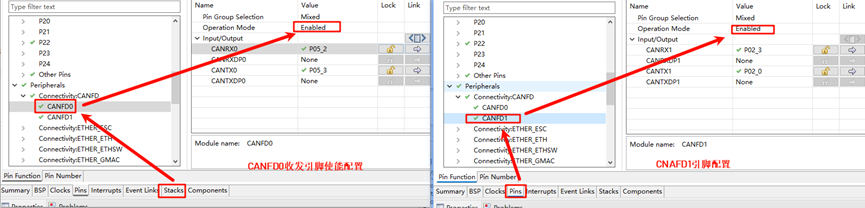
对CANFD的引脚进行配置和使能;
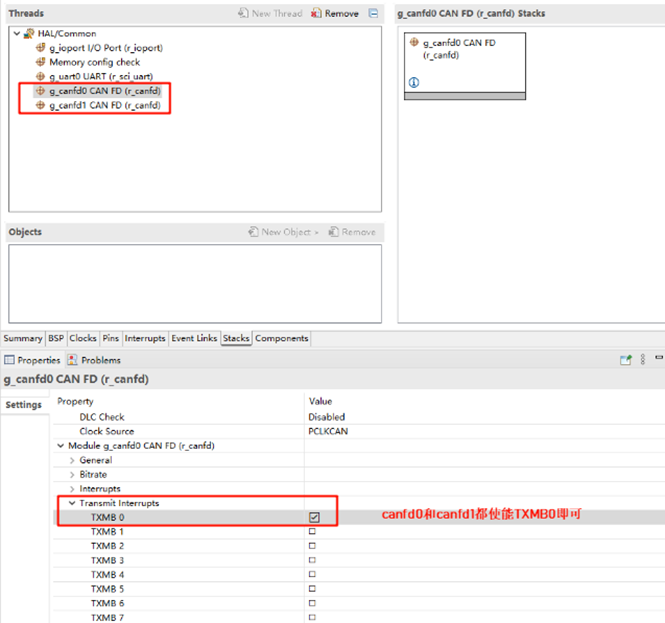
接下来还需要使能发送消息缓冲区中断配置,这能决定当传输完成时应该是哪个消息缓冲区触发中断:
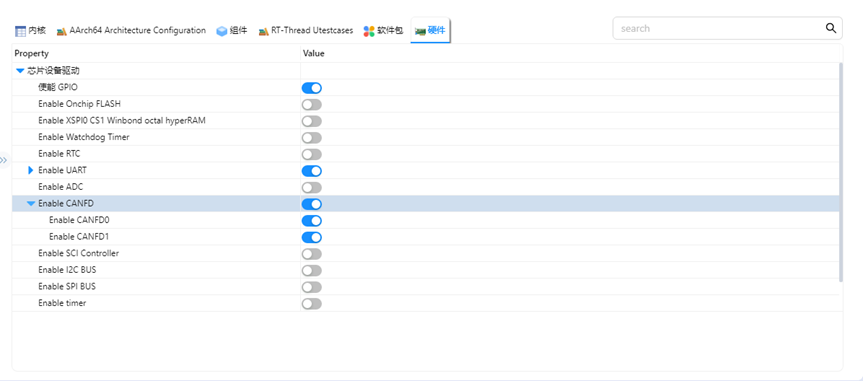
RT-Thread Settings配置
打开RT-Thread Settings,使能canfd配置;
工程示例说明
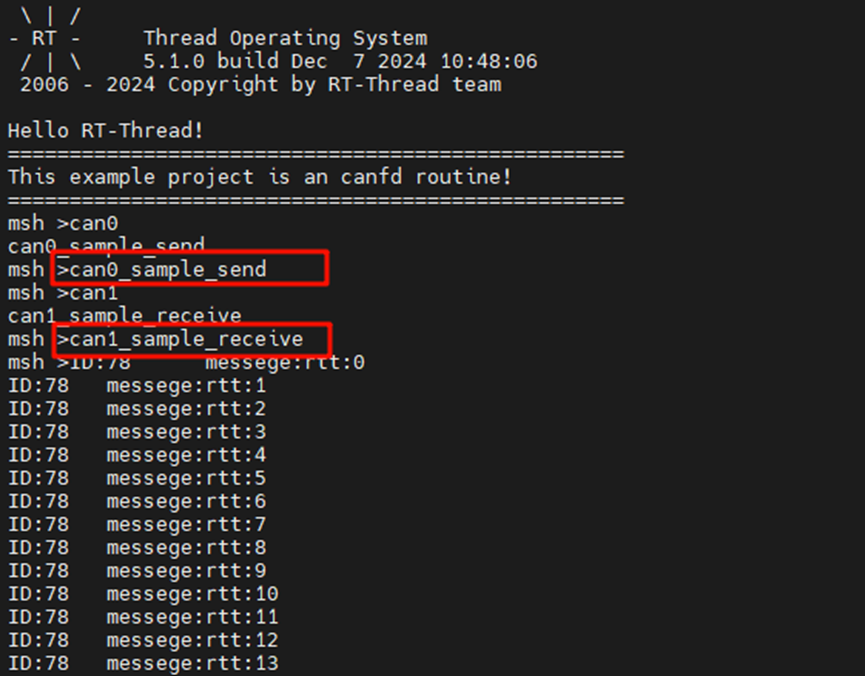
工程通过canfd0发送报文canfd1接收报文并将其使用串口打印
发送代码示例:
int can0_sample_send(int argc, char *argv[])
{
rt_err_t res;
rt_thread_t thread;
char can_name[RT_NAME_MAX];
if (argc == 2)
{
rt_strncpy(can_name, argv[1], RT_NAME_MAX);
}
else
{
rt_strncpy(can_name, CAN0_DEV_NAME, RT_NAME_MAX);
}
/* 查找 CAN 设备 */
can0_dev = rt_device_find(can_name);
if (!can0_dev)
{
rt_kprintf("find %s failed!\n", can_name);
return RT_ERROR;
}
/* 以中断接收及发送方式打开 CAN 设备 */
res = rt_device_open(can0_dev, RT_DEVICE_FLAG_INT_TX | RT_DEVICE_FLAG_INT_RX);
RT_ASSERT(res == RT_EOK);
/* 创建数据接收线程 */
thread = rt_thread_create("can0_tx", can0_tx_thread, RT_NULL, 1024, 25, 10);
if (thread != RT_NULL)
{
rt_thread_startup(thread);
}
else
{
rt_kprintf("create can_rx thread failed!\n");
}
return res;
}
/* 导出到 msh 命令列表中 */
MSH_CMD_EXPORT(can0_sample_send, can device sample);
int can1_sample_receive(int argc, char *argv[])
{
rt_err_t res;
rt_thread_t thread;
char can_name[RT_NAME_MAX];
if (argc == 2)
{
rt_strncpy(can_name, argv[1], RT_NAME_MAX);
}
else
{
rt_strncpy(can_name, CAN1_DEV_NAME, RT_NAME_MAX);
}
/* 查找 CAN 设备 */
can1_dev = rt_device_find(can_name);
if (!can1_dev)
{
rt_kprintf("find %s failed!\n", can_name);
return RT_ERROR;
}
/* 初始化 CAN 接收信号量 */
rt_sem_init(&rx_sem, "rx_sem", 0, RT_IPC_FLAG_FIFO);
/* 以中断接收及发送方式打开 CAN 设备 */
res = rt_device_open(can1_dev, RT_DEVICE_FLAG_INT_TX | RT_DEVICE_FLAG_INT_RX);
RT_ASSERT(res == RT_EOK);
/* 创建数据接收线程 */
thread = rt_thread_create("can1_rx", can1_rx_thread, RT_NULL, 1024, 25, 10);
if (thread != RT_NULL)
{
rt_thread_startup(thread);
}
else
{
rt_kprintf("create can_rx thread failed!\n");
}
return res;
}
运行
编译&下载
RT-Thread Studio:在RT-Thread Studio 的包管理器中下载EtherKit 资源包,然后创建新工程,执行编译。
IAR:首先双击mklinks.bat,生成rt-thread与libraries 文件夹链接;再使用Env 生成IAR工程;最后双击project.eww打开IAR工程,执行编译。
编译完成后,将开发板的Jlink接口与PC 机连接,然后将固件下载至开发板。
运行效果
将CAN0_L与CAN1_L对接,CAN0_H与CAN1_H对接,如下图所示;
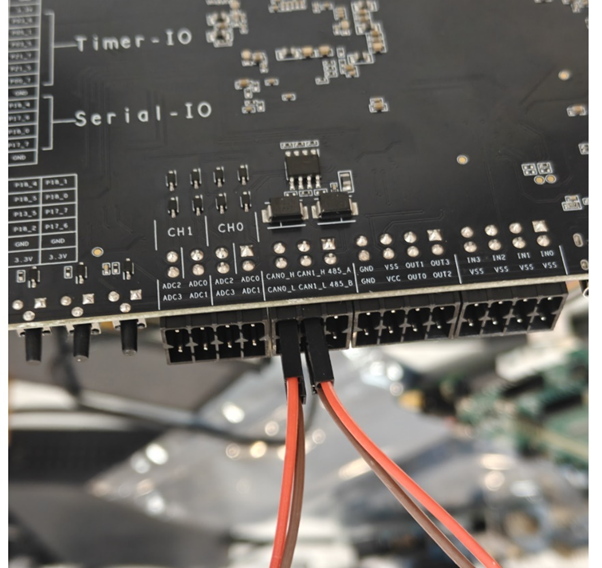
使用串口分别发送can0_sample_send和can1_sample_receive命令进行回环测试;